@robertorobotics @vai_viswanathan Are you doing any offline or online RL?
English
Ludvig Erikson Brangstrup
22 posts
@BrangstrupL
Founder of Qualia https://t.co/eyu2QCyRwm




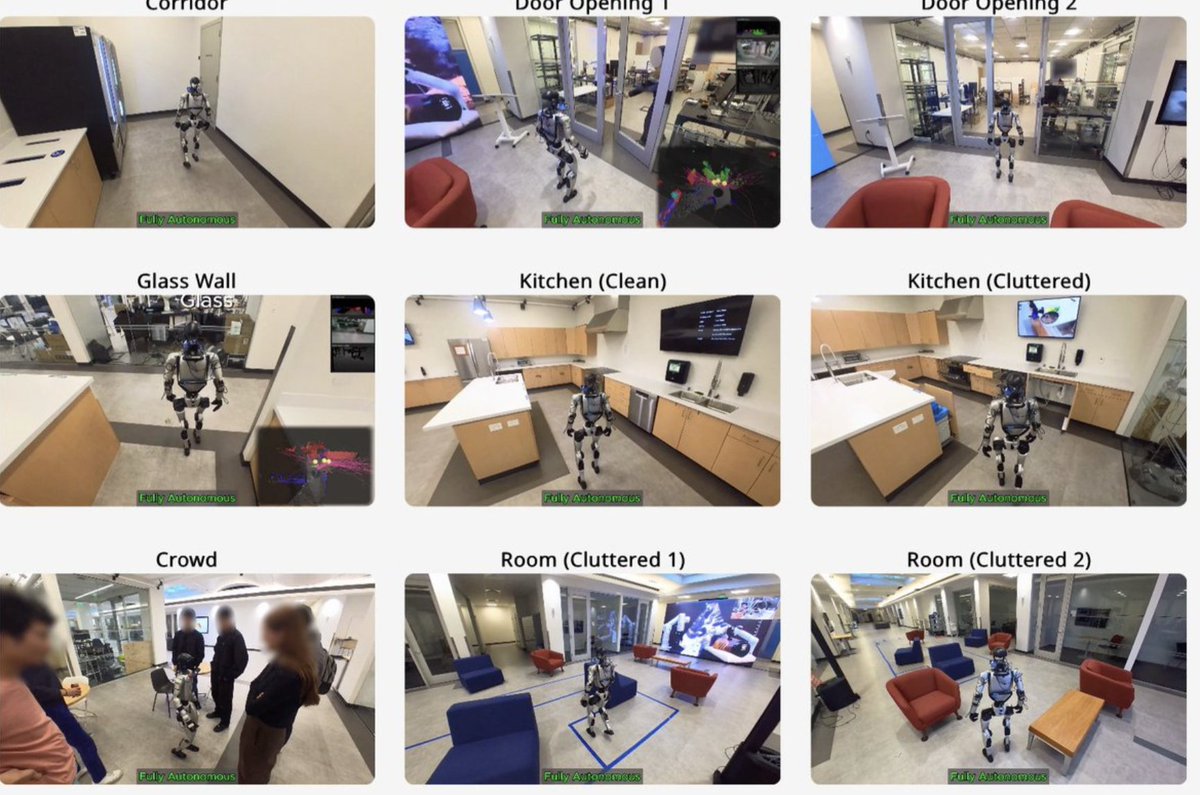
Robotics models often struggle outside controlled environments. Ours is built to work in real ones. Today we're launching MolmoAct 2, which can assist with a host of chores & lab tasks, plus the MolmoAct 2-Bimanual YAM dataset—the largest open robotics dataset of its kind. 🧵


GEN-1 cleans white board Read more about GEN-1 in our blog post in the comments below ↓