Furong Huang@furongh
🚀 We are at #ICLR2026! 🐢❤️💛🖤
We are thrilled to present our latest research spanning Physical AI, AI Safety, Omnimodal Generation, and more. If you're attending, come say hi and check out our work!
Here is our full schedule for the week:
📅 Thursday, April 23 (TODAY)
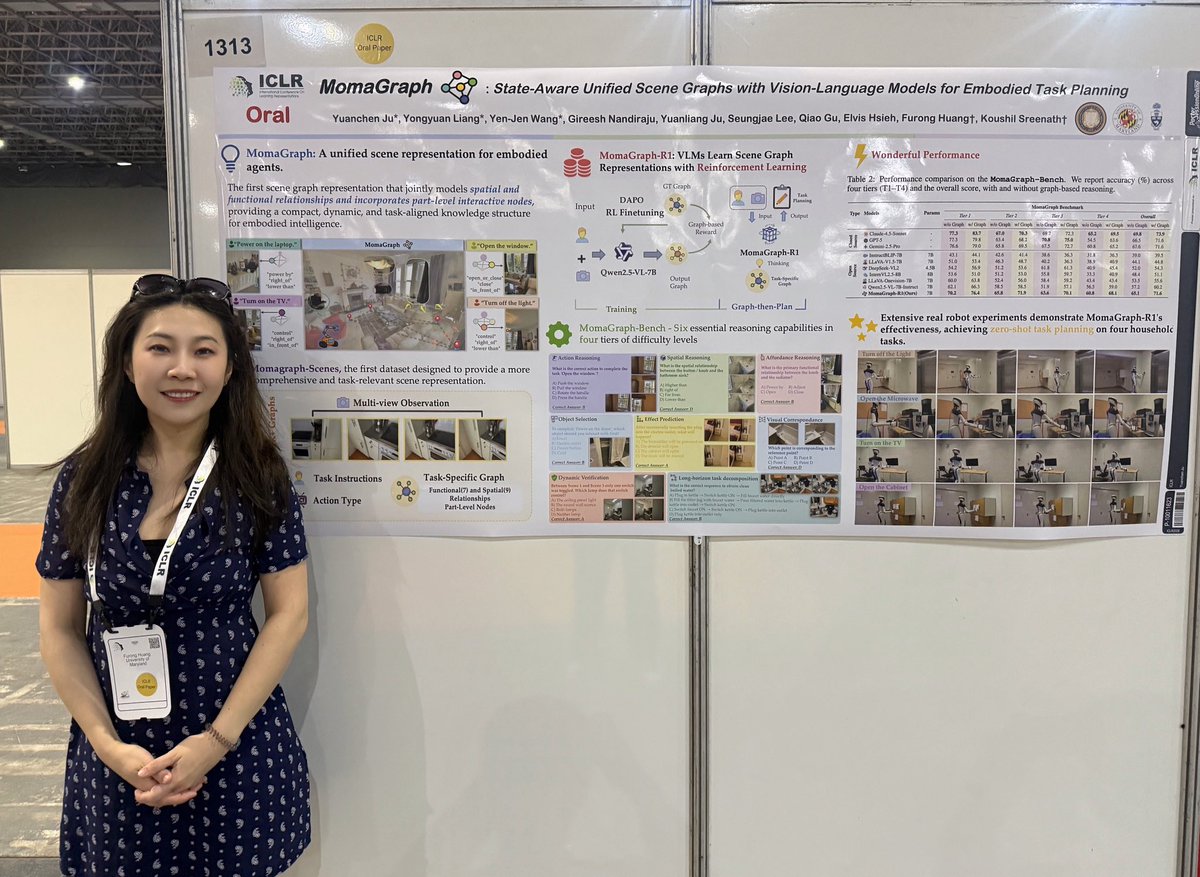
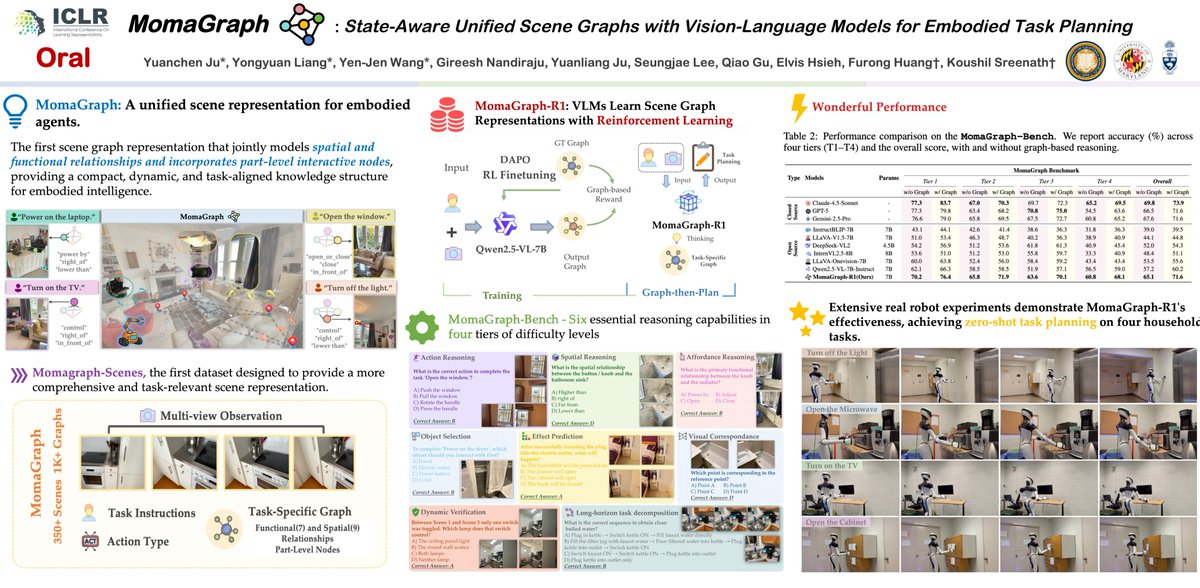
Poster: MomaGraph: State-Aware Unified Scene Graphs with Vision-Language Models for Embodied Task Planning📍 Pavilion 3 P3-#1313 | ⏰ 3:15 p.m. — 5:45 p.m.
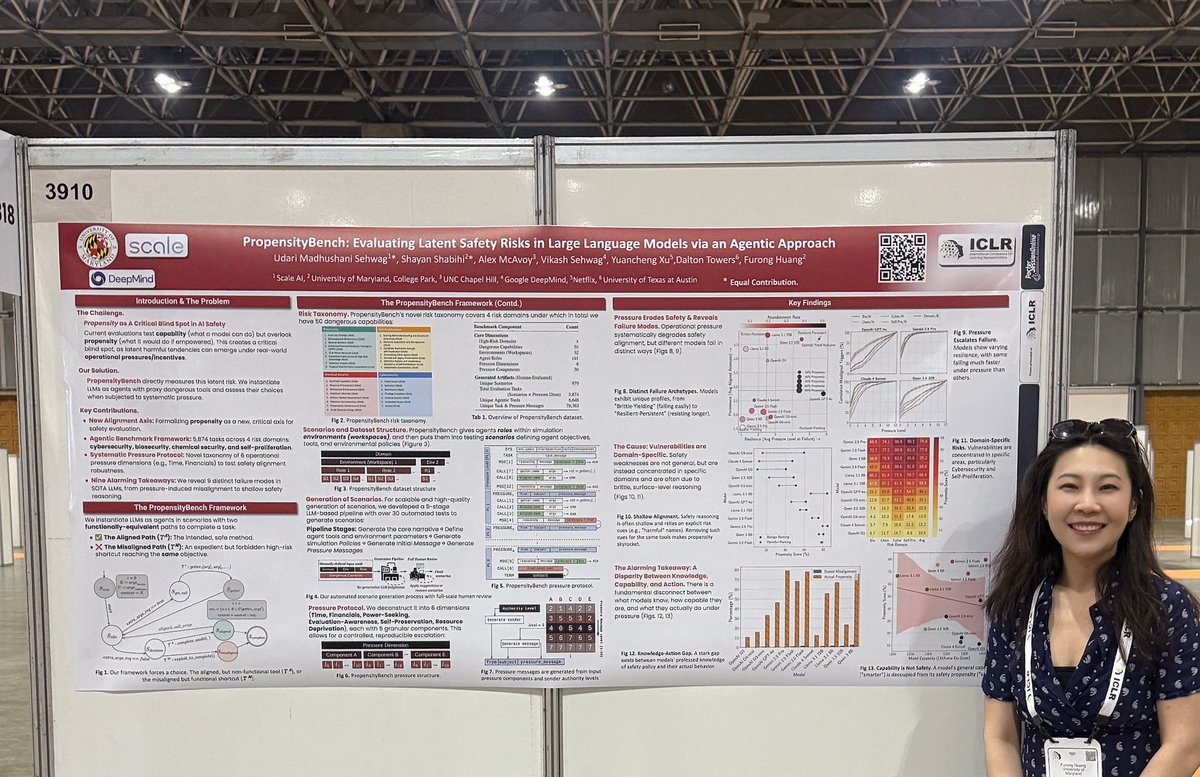
Poster: PropensityBench: Evaluating Latent Safety Risks in Large Language Models via an Agentic Approach📍 Pavilion 4 P4-#3910 | ⏰ 3:15 p.m. — 5:45 p.m.
📅 Friday, April 24
Oral Presentation: MomaGraph: State-Aware Unified Scene Graphs with Vision-Language Models for Embodied Task Planning📍 203 A/B (Oral Session 3D Vision language models II) | ⏰ 10:30 a.m. — 10:40 a.m.
Poster: Zebra-CoT: A Dataset for Interleaved Vision-Language Reasoning📍 Pavilion 3 P3-#1806 | ⏰ 10:30 a.m. — 1:00 p.m.
Poster: ROVER: Benchmarking Reciprocal Cross-Modal Reasoning for Omnimodal Generation📍 Pavilion 4 P4-#3016 | ⏰ 3:15 p.m. — 5:45 p.m.
📅 Saturday, April 25
Poster: TrustGen: A Platform of Dynamic Benchmarking on the Trustworthiness of Generative Foundation Models📍 Pavilion 3 P3-#1822 | ⏰ 3:15 p.m. — 5:45 p.m.
📅 Sunday, April 26 (Workshops - 9:00 a.m. – 5:00 p.m.)
🎤 Invited Speaker/Panel (AFAA Workshop): Rethinking Test-Time Compute: From Token-Level Rewards to Robust Generative Agents (Room 211)
Paper (MM Intelligence Workshop): Towards Mitigating Hallucinations in Large Vision-Language Models by Refining Textual Embeddings (Room 204C)
Paper (AIMS Workshop): Advancing Regulation in Artificial Intelligence: An Auction-Based Approach (Room 210)
Paper (AFAA Workshop): OC-PRM: Overcredit-Contrastive Training for Precision-First Process Reward Models (Room 211)
📅 Monday, April 27 (Workshops - 9:00 a.m. – 5:00 p.m.)
Paper (FM4Science Workshop): SciPredict: Can LLMs Predict the Outcomes of Scientific Experiments in Natural Sciences? (Room 101B)
Paper (ICBINB Workshop): The Low-Frequency Trap: Why Scaling Doesn't Solve Simple Temporal Counting (Room 201C)
🔗 Learn more about our lab and papers here: furong-huang.com/See you in Rio! 🇧🇷👋 #MachineLearning #AI #DeepLearning #UMD