We’re live at @NVIDIAGTC. 🚀
All week at Booth 1406 right by the entrance to Hall 2, the energy around @LightwheelAI has been incredible.
If you’re at @NVIDIAGTC, come say hi.
English
Lightwheel
122 posts

@LightwheelAI
Simulation Infrastructure for Physical AI
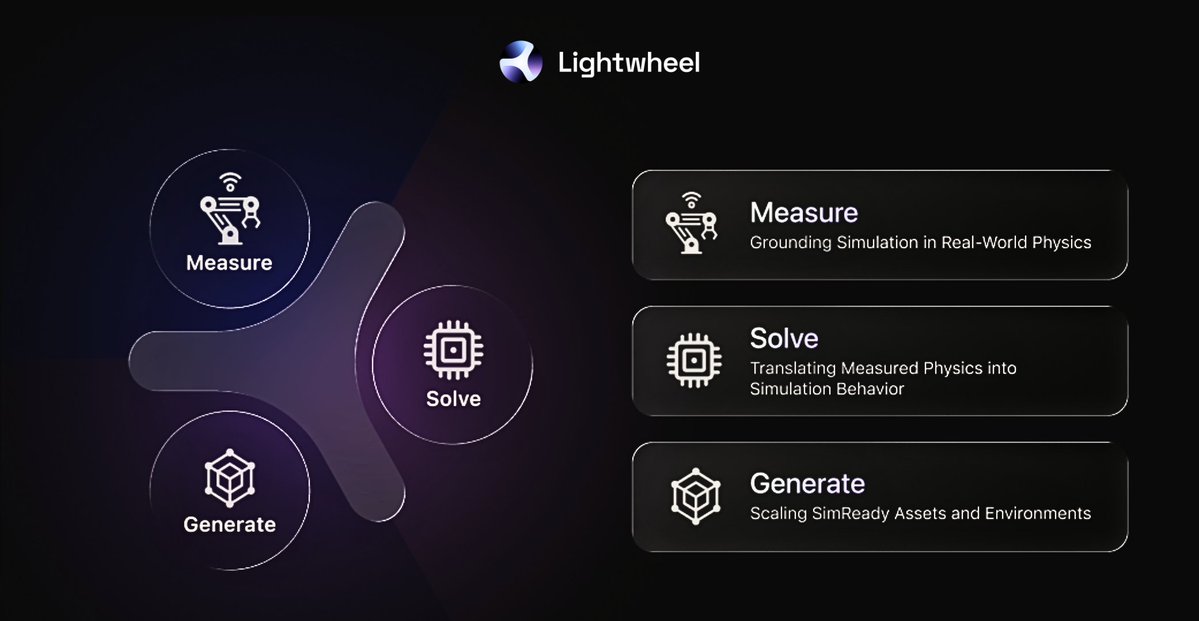
.@LightwheelAI has joined the Newton Technical Steering Committee to help lead the future of physically grounded simulation. As part of the Newton initiative under The Linux Foundation, alongside @nvidia , @GoogleDeepMind, Disney Research, and @ToyotaResearch, Lightwheel is leading core efforts shaping the next generation of simulation infrastructure for Physical AI. As simulation becomes foundational to real industrial and embodied AI workflows, the challenge is no longer just scale. It is physical accuracy, reuse, and deployment readiness. These are the infrastructure problems that will determine whether simulation can truly support robot training, evaluation, and real world deployment, and they are exactly where Lightwheel is helping drive the ecosystem forward. Lightwheel’s work across Newton includes: • Leading SimReady schema evolution and technical direction • Driving solver advancement and real to sim calibration workflows • Building physically grounded tooling for real to sim data generation • Delivering physically measured, solver validated reference assets and environments This is the infrastructure layer needed to move simulation closer to real world physics and support the next wave of Physical AI. Learn more here: developer.nvidia.com/blog/newton-ad… If you’re at NVIDIA GTC today or tomorrow, stop by Booth 1406 to learn more about what Lightwheel is building. #PhysicalAI #NVIDIAGTC #Robotics #EmbodiedAI #Simulation #HumanoidRobotics @NVIDIAAI
















Santa Clara was fire! 🔥 Together with @LightwheelAI we hosted a party for the physical AI community. Once Steve Xie (@bgxc) reached out to make the coolest robotics event during GTC, I was like 'hold my actuator, we got it'! I knew there would be tons of people into robotics, simulation, and embodied AI at GTC, but I had no idea there would be so many of you! At the peak, there were over 350 of us! 🤯 We had dancing humanoids, fighting bots, lots of them! We even had a Cybertruck with a robot arm attached to it (I'm not kidding). Crazy energy, awesome people from researchers, to founders and operators to investors, A lot of robo-friends in one place. 🫶🏼 We even had a humanoid robot featuring at the DJ booth! That's everyone for coming! It was awesome to co-host such an amazing event! More parties to follow throughout the 2026, so stay tuned! ~~ ♻️ Join the weekly robotics newsletter, and never miss any news → ziegler.substack.com