Angehefteter Tweet

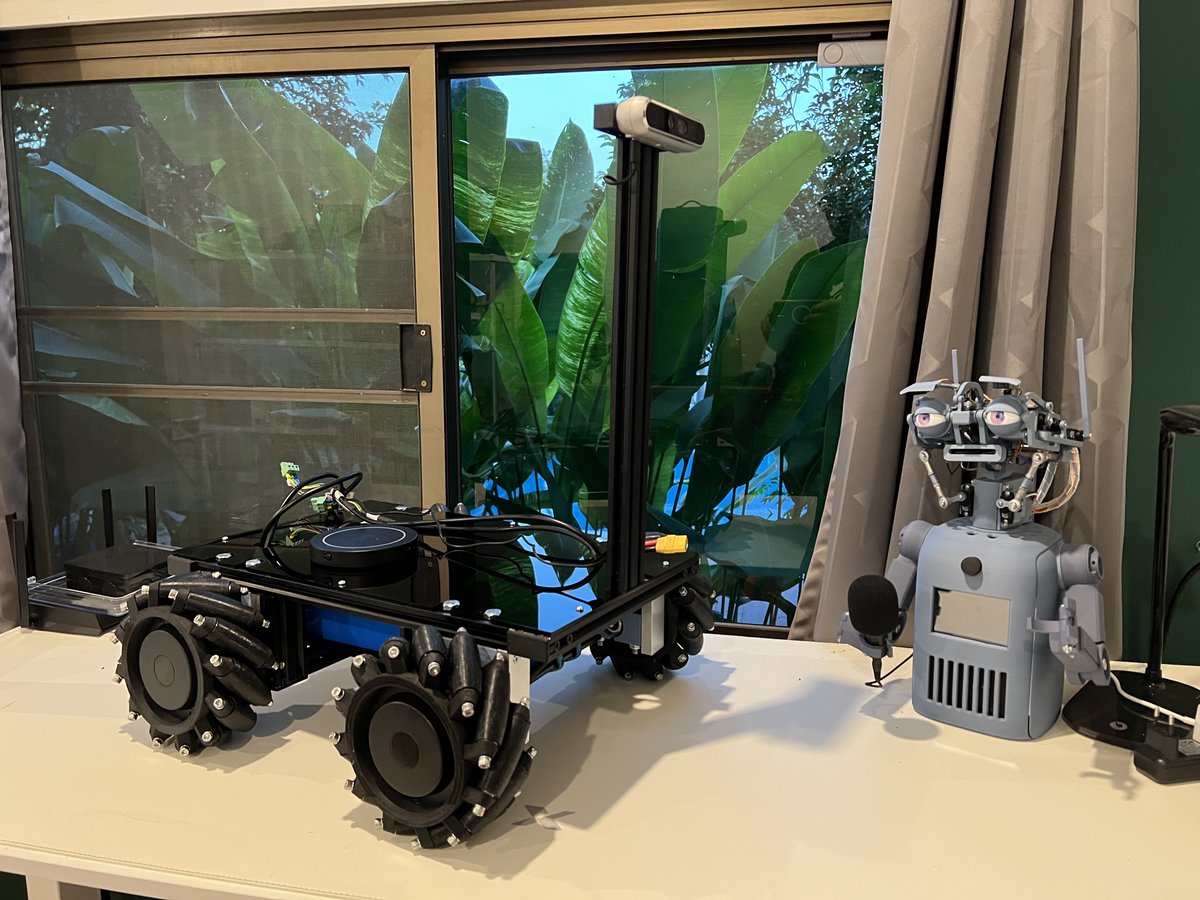
A new chapter for @vitanovashow
While taking Vita out and recording some clips for the past weeks we’ve been learning a ton trying new tech and listening to what people want to see next
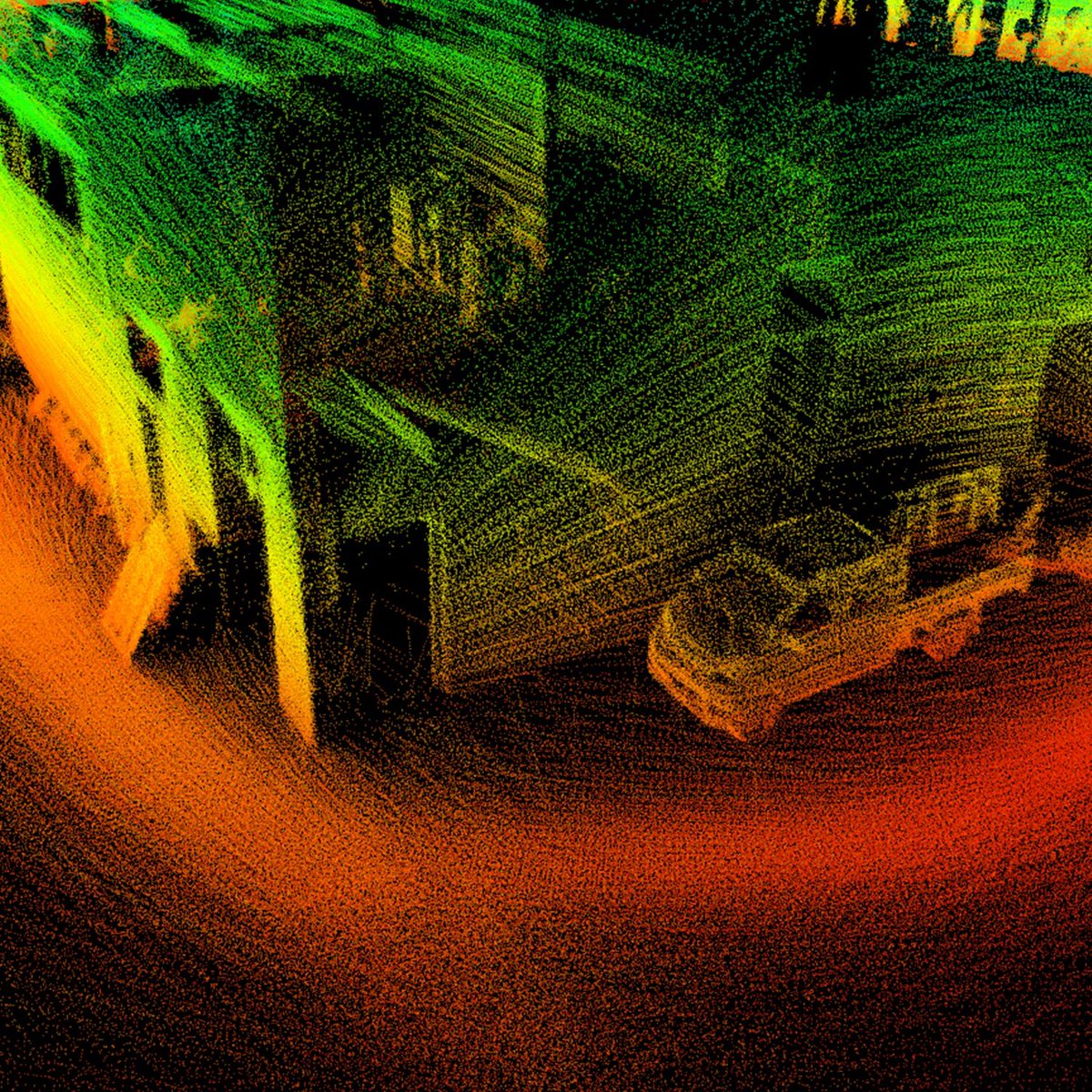
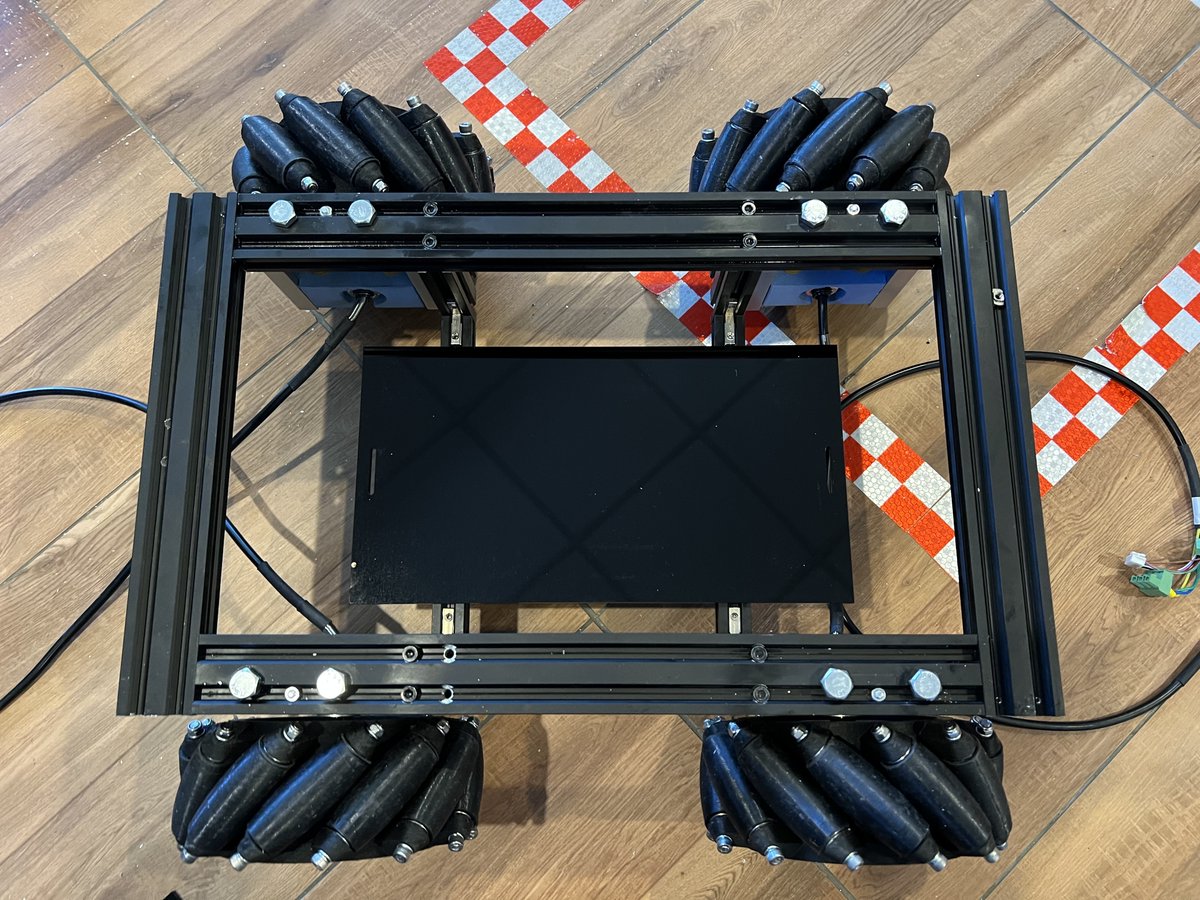
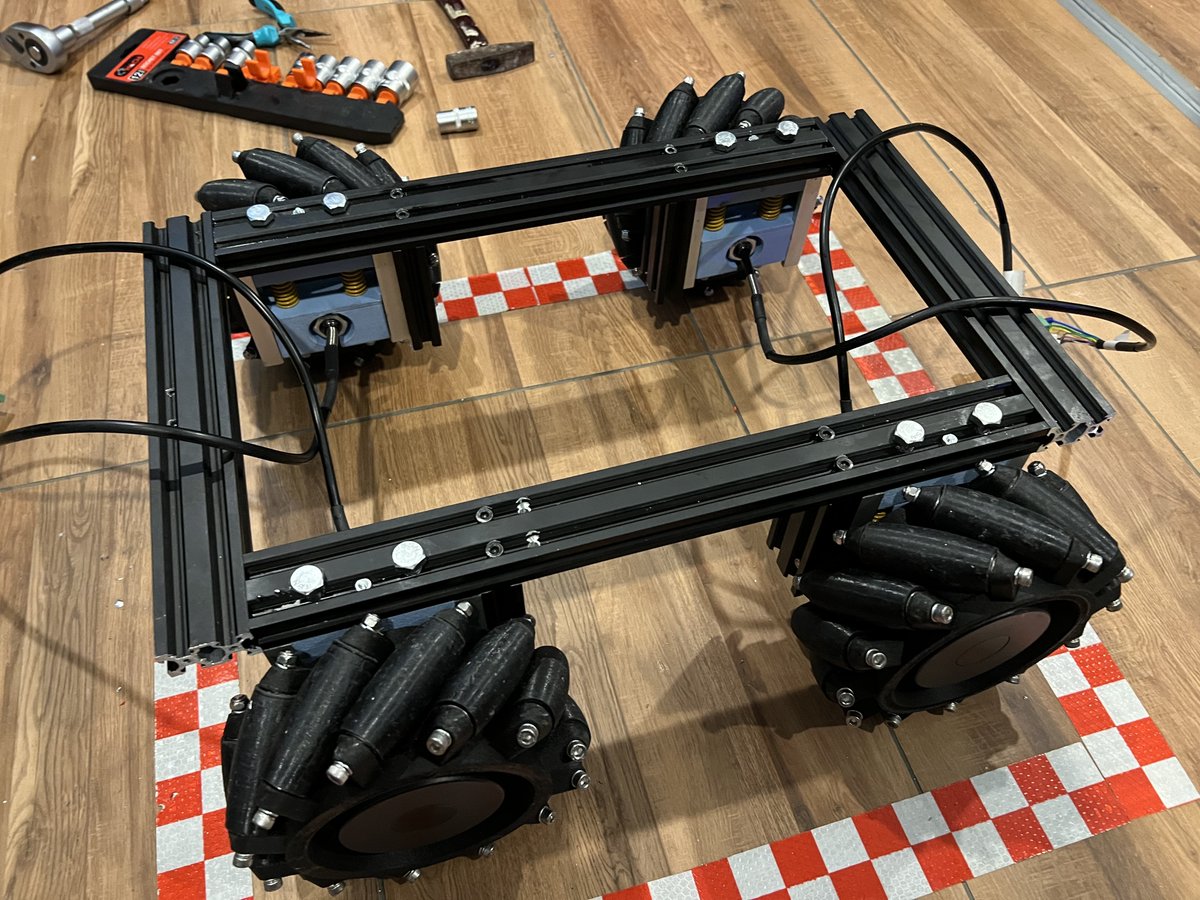
We are feeling ready to take on a whole new frontier of robotics rebuilding her hardware from the ground up with way more real world capability and intelligent vision guiding her actions and navigation. To make this work we will start with a more gradually developing character that is simpler but more capable
Excited to bring the build logs back soon. What are you most excited to see?
English