
renato strano
81.6K posts

renato strano
@renestrano
Le persone possono dimenticare ciò che hai detto, ciò che hai fatto, ma non dimenticheranno mai come le hai fatte sentire Maya Angelou profile pic @twittatore
Italy Rome Beigetreten Aralık 2010
666 Folgt570 Follower

Da come batteva pugni sul tavolo per ripristinare Druzhba, sembrava che in SK la gente dovesse svuotare i tagliaerba per riempire i serbatoi delle auto e poi Orban perde elezioni e la Slovacchia ha improvvisamente abbastanza petrolio anche per esportarlo.
Interessante, vero?

Italiano
@renestrano Poi uno scopre che da tempo abbiamo il gasolio tramite Croazia (Adria) e per questo, anche adesso, benzina e diesel in SK è a 1.5€
Italiano
renato strano retweetet
Inadeguatezza, incompetenza, sprezzo per il ridicolo, sdoganamento di ignoranza e malafede. Bugie pericolose. Speriamo passi presto questo momento storico vergognoso.
Italiano




renato strano retweetet

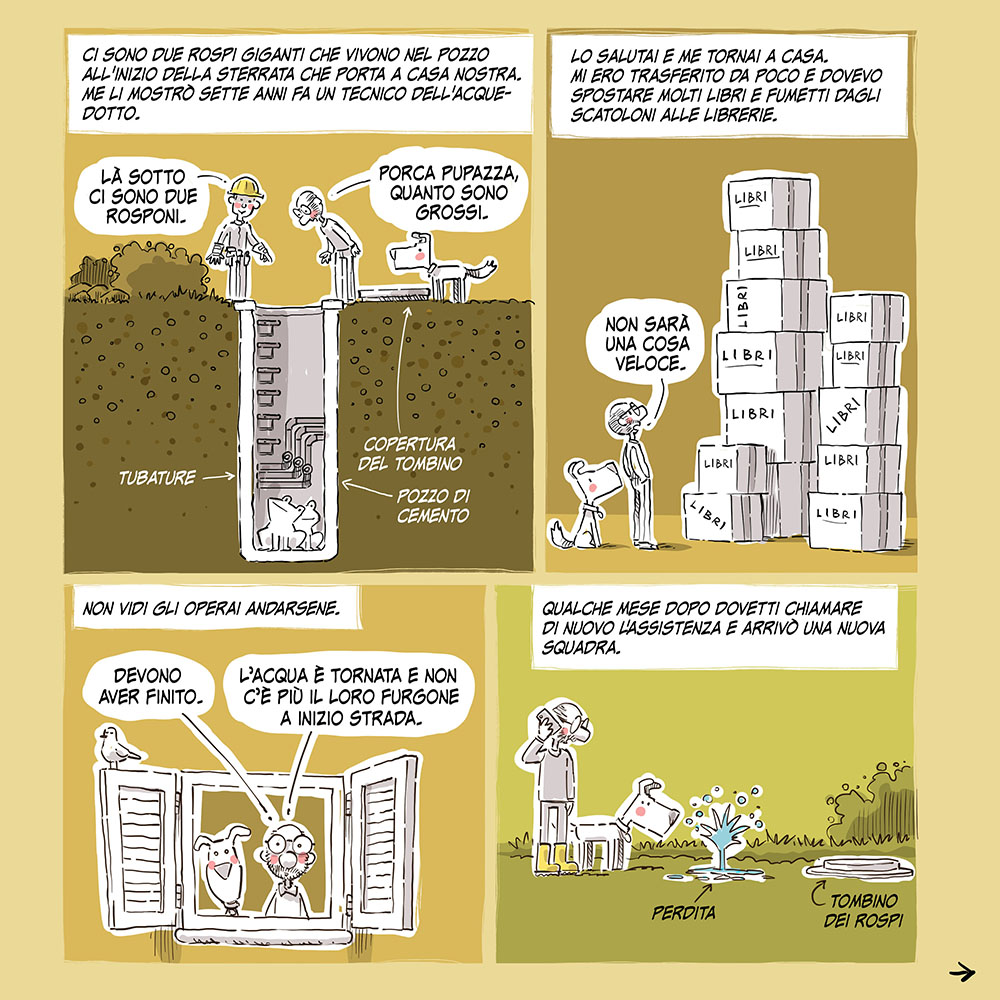
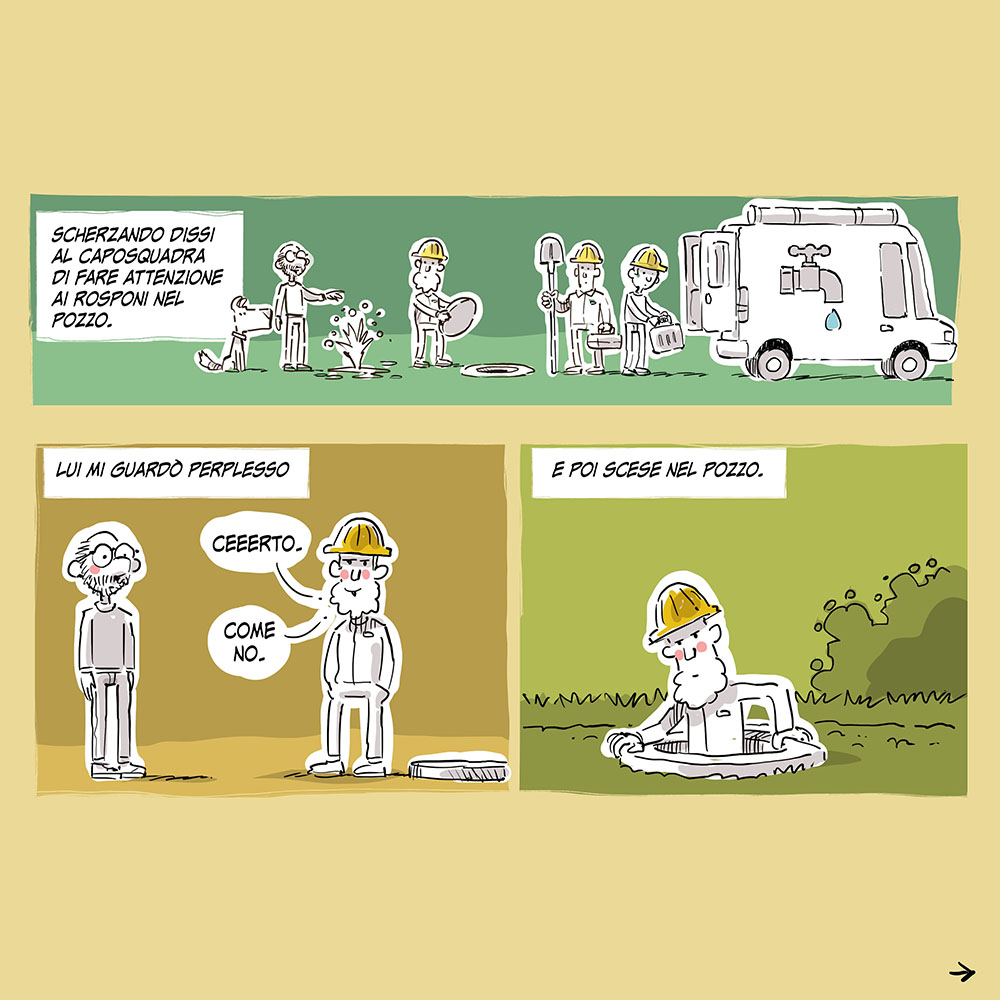
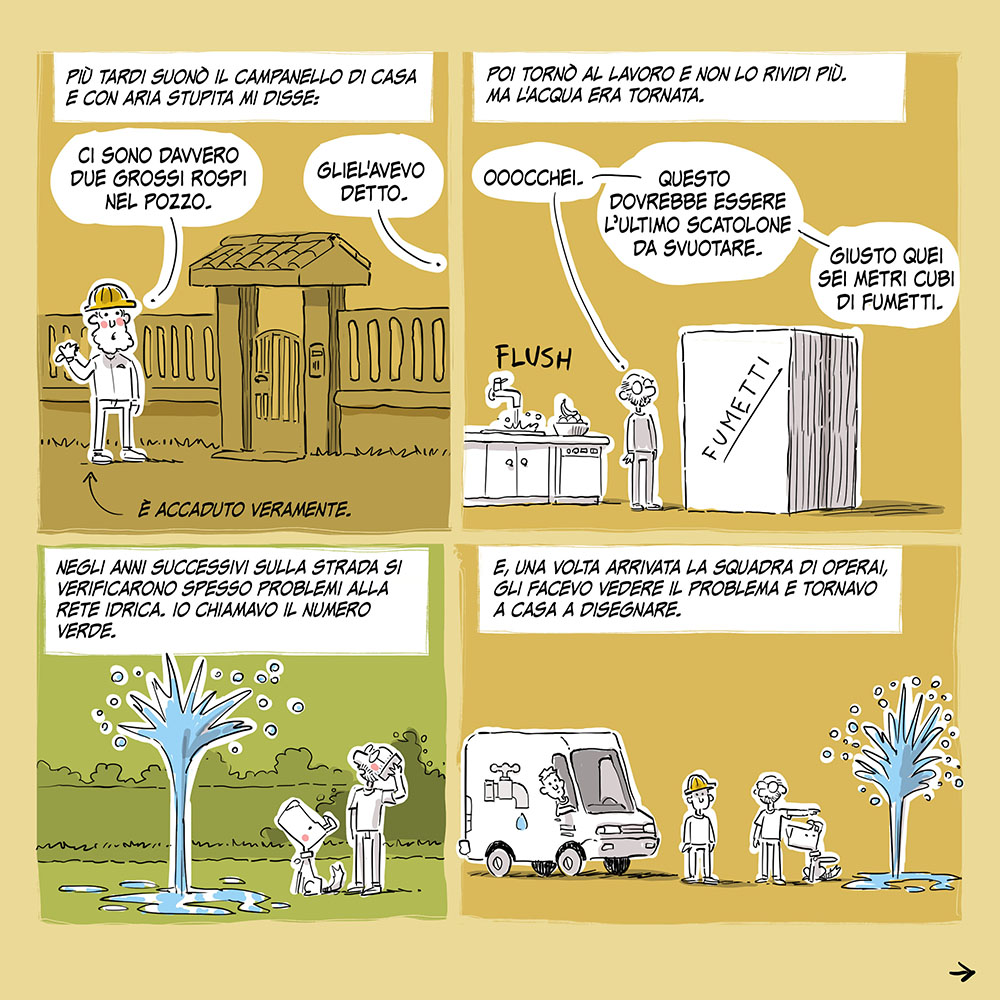
Rospi giganti che vivono nei pozzi dell'acquedotto, riparazioni idriche, postini in pericolo, misteriose sparizioni e cesti regalo; tutto in questa storiella. È accaduto realmente (o quasi). (continua nel commenti).
#tartapazzo #vitadicampagna #rospi #vitavera

Italiano
renato strano retweetet


‘M’illumino d’immenso’ lo ha già scritto qualcuno, ma non saprei trovare altre parole per dire quanto disperatamente mi manchi e quanto infinitamente ci sei, in ogni sguardo felice di ragazzi come te. Continuiamo a sognare insieme, Fra ❤️
#24framealsecondo #cinema #Under25

Italiano
Che serata meravigliosa ❤️❤️❤️
BNL BNP Paribas Media Relations@BNL_PR
Le luci si abbassano, l’Auditorium “Fabio Gallia” #BNL #BNPParibas è gremito come sempre: parte la 3^semifinale di @24frame_, concorso di corti per #giovani registi esordienti. La Banca sostiene la manifestazione. #energia, #creatività, visioni di #futuro. #cinema @PaolaDiCaro
Italiano
renato strano retweetet

A volte la stanchezza e il dolore alle ginocchia si fanno sentire ma l'affetto e l'amicizia dei bambini sono una grande spinta per non fermarsi. Ogni bene a tutti. Fra Luca

Italiano


renato strano retweetet

📖 Venerdì 17 aprile sarò ad Aosta con l'amico Andrea Bernagozzi per presentare il mio libro "Rimasti a Terra" (il Mulino)! Ci vediamo lì?🙌
#RimastiATerra #Aosta #ilMulino #spazio

Italiano
renato strano retweetet
Che bel esempio della manipolazione dell'opinione pubblica!
- Magyar ha detto che intende SOSPENDERE (non chiudere) i media del gruppo statale MTVA, per riformarli e renderli autonomi.
Giusto una piccola differenza.
La Stampa@LaStampa
Una delle prime mosse del nuovo governo ungherese di Peter Magyar è chiudere i media pubblici. "Abbiamo diritto a un sistema pluralista, conforme agli standard dalla Bbc o anche migliore - ha detto il premier che ha battuto Orbán, al potere da 16 anni -. La tv di Stato mi ha invitato solo ora, dopo un anno e mezzo, a illustrare il programma di Tisza: la propaganda ha il senso dell'umorismo". #magyar
Italiano
Nota odierna di @kommander61
Kommander61@kommander61
Nel bilancio ancora parziale di questa guerra, sia Stati Uniti che Israele raggiungono obiettivi parziali e mettono in discussione la loro vicinanza strategica. Sullo sfondo un Iran che cerca di fattorizzare la sopravvivenza del regime come conferma della sua resilienza,
Español
renato strano retweetet
Lo scudo termico di Orion è fatto di Avcoat, materiale composto da una resina epossidica-novolacca rinforzata con fibre di silice, inserita in una struttura a nido d'ape in fibra di vetro. Questa tecnologia, derivata dal programma Apollo, è stata aggiornata per le esigenze del programma Artemis.
Il rientro in atmosfera è molto più critico per le missioni lunari che per le missioni in orbita bassa come quelle della Stazione Spaziale Internazionale o dello Space Shuttle, perché le velocità di rientro sono molto più elevate, intorno a 40.000 km/h, e l’impatto con l’atmosfera fa sì che le temperature esterne possano superare i 2.700 gradi Celsius.
Per proteggere l'equipaggio si usa un materiale “ablativo”, cioè che si consuma intenzionalmente in modo controllato durante il rientro: sfaldandosi, i suoi frammenti portano via con sé il calore, impedendo che questo penetri nella struttura interna della capsula.
Prima della missione Artemis II c’era qualche preoccupazione per lo scudo termico, che nel 2022 durate il volo di prova di Artemis I aveva subito fessurazioni più profonde del previsto e il distacco di piccoli frammenti. Le indagini avevano rivelato che il materiale era meno poroso di quanto calcolato e che durante la complicata manovra di rientro i gas prodotti dalle reazioni chimiche erano rimasti intrappolati all'interno della struttura; la pressione crescente aveva causato il distacco di pezzi di scudo invece di un consumo uniforme. L’equipaggio sarebbe comunque rimasto al sicuro, ma per evitare che il problema si ripetesse la NASA ha deciso di modificare la traiettoria di rientro in modo da ridurre l’accumulo di gas dentro lo scudo termico e ottenere un consumo più regolare del materiale ablativo.
La resina epossidica, la fibra di vetro e la fibra di silice sono tutti componenti dell’AVCOAT. La resina ha proprio l’obiettivo di decomporsi chimicamente e assorbire calore attraverso un processo chiamato pirolisi, che a differenza nella combustione non impiega ossigeno.
L’ossido di zirconio, o zirconia, è un eccellente materiale ceramico, ma viene impiegato principalmente come rivestimento termico negli ugelli dei motori a razzo o nelle turbine, dove deve resistere al calore senza consumarsi, al contrario di quanto richiesto a uno scudo ablativo.

Andrea Ferrero@a_a_f_t
Quiz del lunedì. Quale dei seguenti materiali non fa parte dello scudo termico del veicolo spaziale Orion? Soluzione domani, non suggerite!
Italiano
renato strano retweetet
Mini-thread. Ho un’idea per il secondo libro. Raccontare, sia dal punto di vista scientifico che di quello umano, esperienze di pazienti oncologici che ce l’hanno fatta o che ce la stanno facendo. Essenzialmente per dimostrare che non sono un’eccezione e sono sempre di più.
Italiano