ULTRA: Unified Multimodal Control for Autonomous Humanoid Whole-Body Loco-Manipulation
arxiv.org/pdf/2603.03279
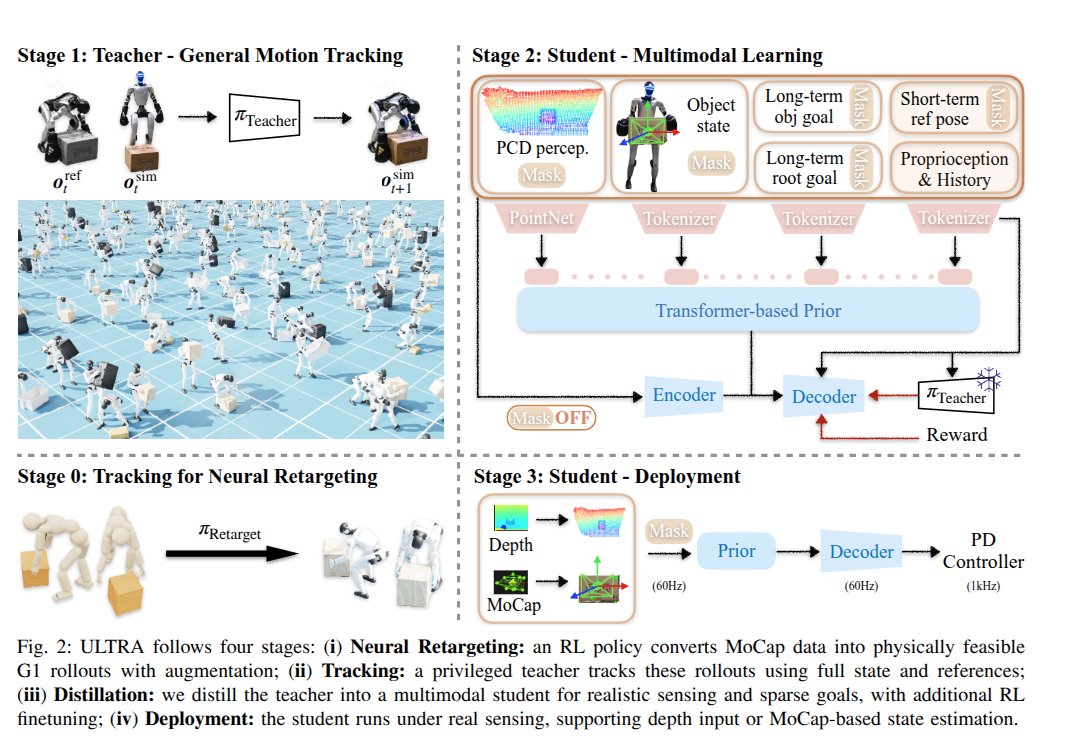
1. RL based retargetting
2. multi-modal command student distillation and finetuning so that it can switch between goal reaching vs reference tracking, mocap vs depth
English