固定されたツイート

We’re excited to announce that NeuroMesh has secured a $5M investment in our Strategic Round at a $50M valuation, with participation from @alphacapital_vc and @CoinvestorV.
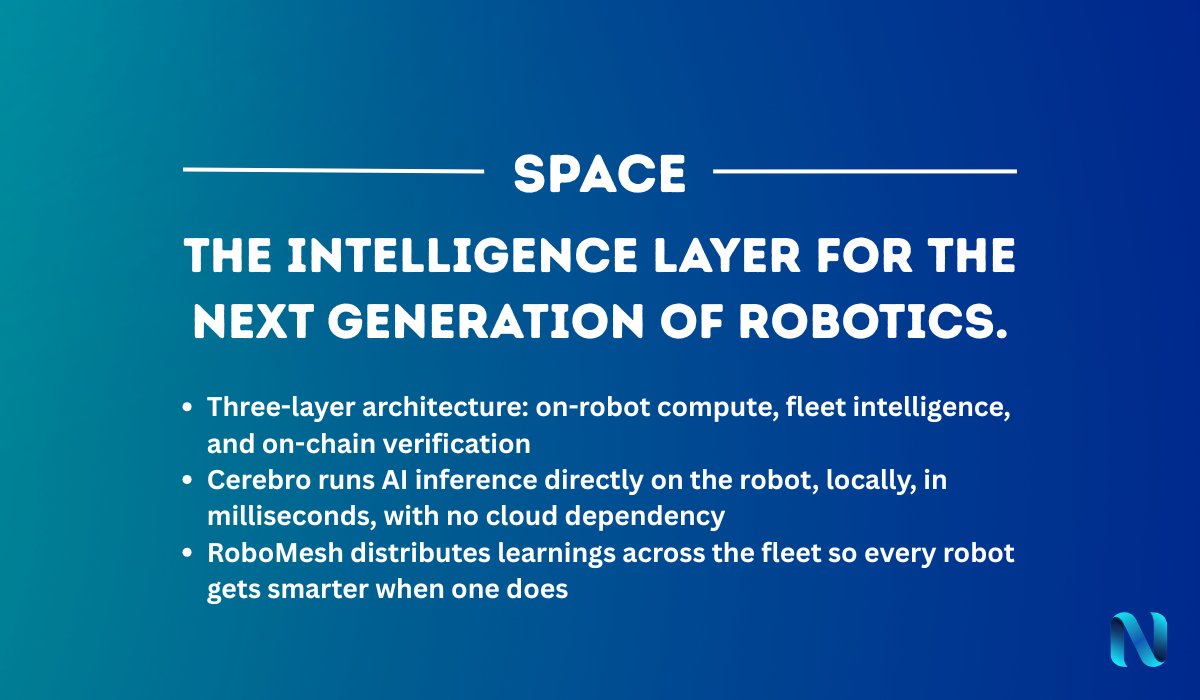
NeuroMesh is powering embodied AI with an on-device intelligence stack, so robots can perceive, plan, and execute in real time without relying on the cloud, while their learnings propagate into a decentralized collective brain that improves across the network. This moves us closer to a world where autonomy is native, verifiable, and shared.
Massive thanks to our investors, partners, and community for backing the mission.
The new era of on-robot intelligence has begun.

English