고정된 트윗

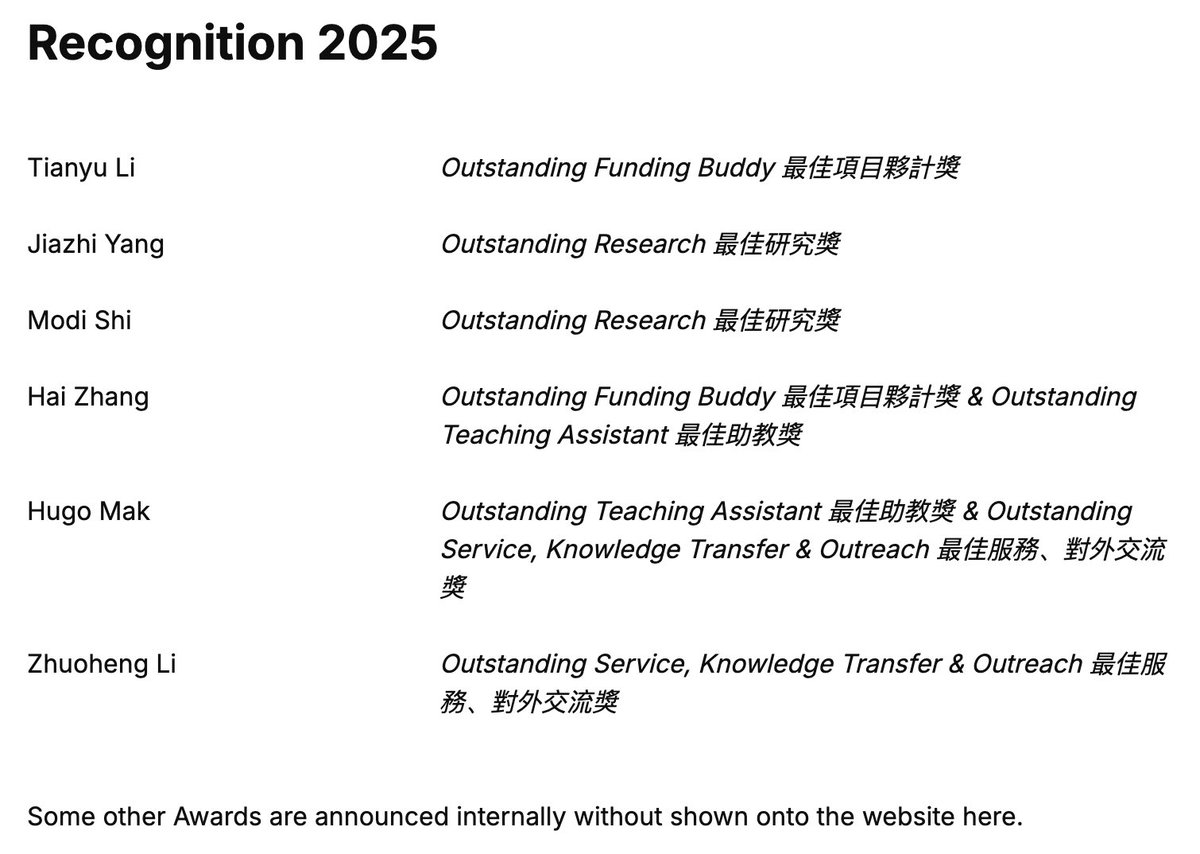
📣 #Recognition #ResearchAward As we usher in the Year of Horse, our team recognizes outstanding members from the past year in the exceptional contribution of areas. Congratulations!!! Let’s rock ‘n’ roll in 2026 🕶️🍾🎆🥂#opendrivelab


English
OpenDriveLab
213 posts

@OpenDriveLab
Official account for OpenDriveLab @hkuniversity and Beyond. We do cutting-edge research in Robotics, Autonomous Driving. Email: [email protected]


SONIC is now open-source! Generalist whole-body teleoperation for EVERYONE! Our team has long been building comprehensive pipelines for whole-body control, kinematic planner, and teleoperation, and they will all be shared. This will be a continuous update; inference code + model already there, training code and gr00t integration coming soon! Code: github.com/NVlabs/GR00T-W… Docs: nvlabs.github.io/GR00T-WholeBod… Site: nvlabs.github.io/GEAR-SONIC/





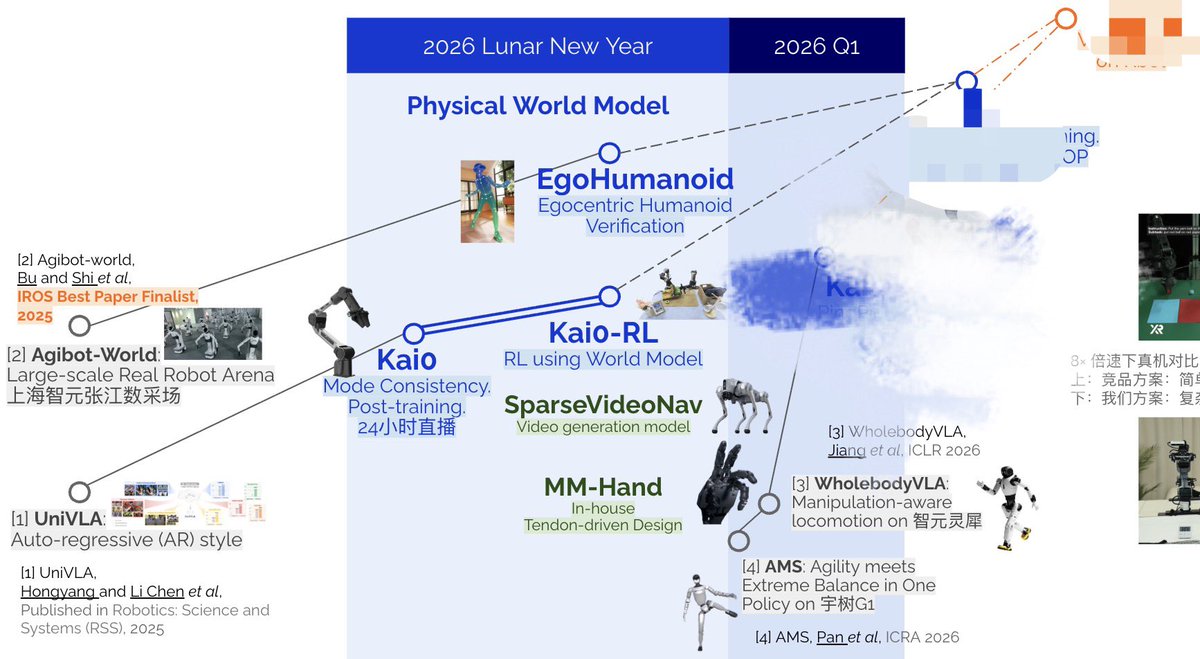
Humanoid robots have been prisoners of the lab. We set them free — with human data. We present EgoHumanoid: The first endorsement of human-to-humanoid transfer for whole-body loco-manipulation. 🔗 Home: opendrivelab.com/EgoHumanoid 📑 Arxiv: arxiv.org/abs/2602.10106 🧵👇
🧥 Live-stream robotic teamwork that folds clothes. 6 clothes in 3 minutes straight. χ₀ = 20hrs data + 8 A100s + 3 key insights: - Mode Consistency: align your distributions - Model Arithmetic: merge, don't retrain - Stage Advantage: pivot wisely 🔗 mmlab.hk/research/kai0