This is a demonstration video of in-hand object rotation with new Torobo Hand.
By leveraging large-scale parallel reinforcement learning in NVIDIA Isaac Sim, the learned policy can perform object manipulation in MuJoCo and on the real robot without any additional training.
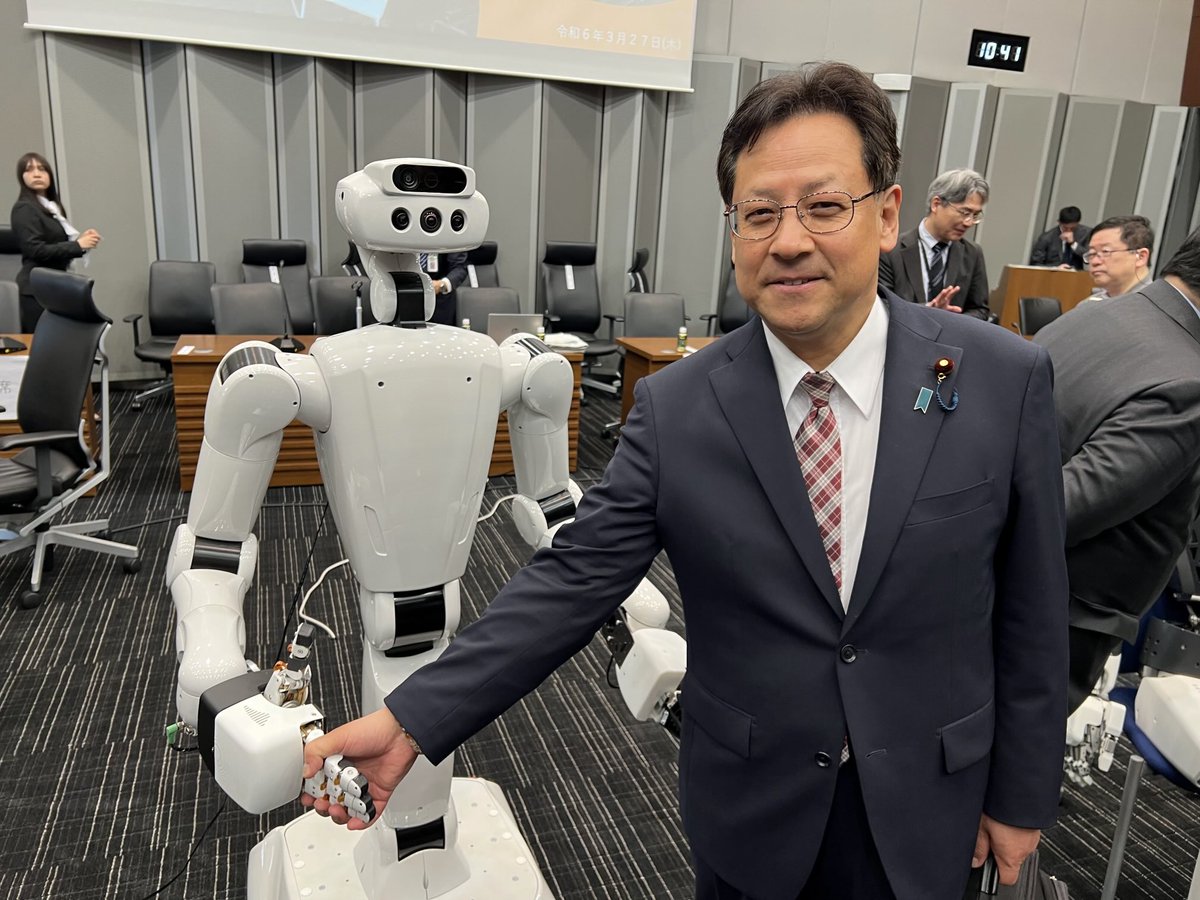
Explore a future where humans and robots work hand-in-hand 🤖🤝! Torobo, a humanoid robot from @Tokyo_Robotics, carries cardboard, saws wood 🪚, and more. The goal: let robots do labor so humans can focus on intelligence and creativity. robotics.tokyo#InnovationJapan
Explore a future where humans and robots work hand-in-hand 🤖🤝! Torobo, a humanoid robot from @Tokyo_Robotics, carries cardboard, saws wood 🪚, and more. The goal: let robots do labor so humans can focus on intelligence and creativity. robotics.tokyo#InnovationJapan