Hiroshi Okajima retweetou

【忘れない、あの日を。】
東日本大震災から15年、熊本地震から10年。この節目の年に、未来を守る防災について考えてみませんか。
#熊助組 #クラファン、挑戦中!さらなるご支援が、私たちの大きな力になります。
#熊本大学 #災害ボランティア
詳細▶glocal-cf.com/project/kumasu…

日本語
Hiroshi Okajima
15.2K posts


@control_eng_ch
岡島寛 | 制御工学チャンネル(登録者1万人) https://t.co/nB4OA1WtLc Ctrl Blog https://t.co/WiuCPpEM41 熊大准教授(情電,電子)Assoc. Prof. Kumamoto Univ. , Control Engineering
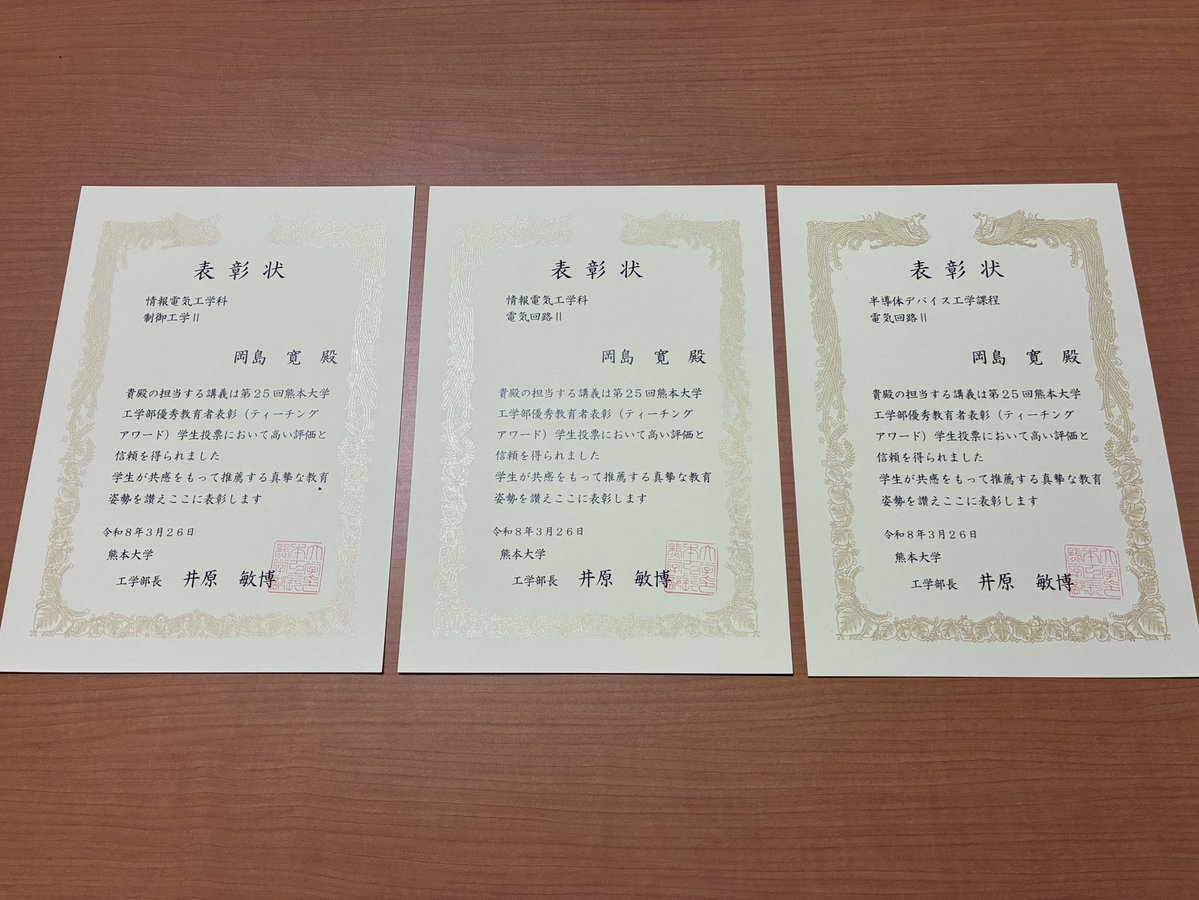
昨年に引き続きティーチングアワードを受賞しました。制御工学IIおよび電気回路IIでの受賞となります。電気回路は、情電と半導体の学生が受講していることで、それぞれで頂きました。ありがたいことです。 制御工学、電気回路の講義準備は次年度に向けて行なっており、更なる改善を進めていきます。

本日、午前中に卒業式があり、午後から情報電気工学科・情報電気工学専攻の卒科式および卒専攻式が執り行われました。 今年度は情報電気工学専攻として最後の節目となる式となりました。 卒業生・修了生の皆様の今後のご活躍を心より祈念いたします。

部屋の温度制御youtu.be/V8EtPrx2pKM?si… @YouTubeより

やったー(∩´∀`∩)学生さん良く頑張った!