Закреплённый твит

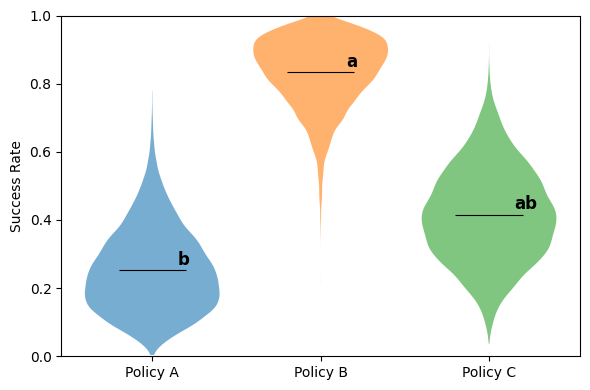
A huge shout-out to TRI's VLA team for the public release of VLA Foundry! You can take full control of VLA training with this fully open-sourced codebase, which comes with a nice GUI dashboard with rigorous policy comparison powered by STEP🪜 tri-ml.github.io/step/
Jean Mercat@MercatJean
Releasing VLA Foundry: an open-source framework that unifies LLM, VLM, and VLA training in a single codebase. End-to-end control from language pretraining to action-expert fine-tuning — no more stitching together incompatible repos.
English