ReedNerdTech รีทวีตแล้ว

Elon Musk: "We gotta be excited about the future. We gotta do things that make us want to live,
It cannot always be about problems every day”
English
ReedNerdTech
2.4K posts


@TechTimeReed
Tech Enthusiast 🚀, from gadgets to space 🌌: a journey in innovation.










Electromagnetic mass drivers on the Moon

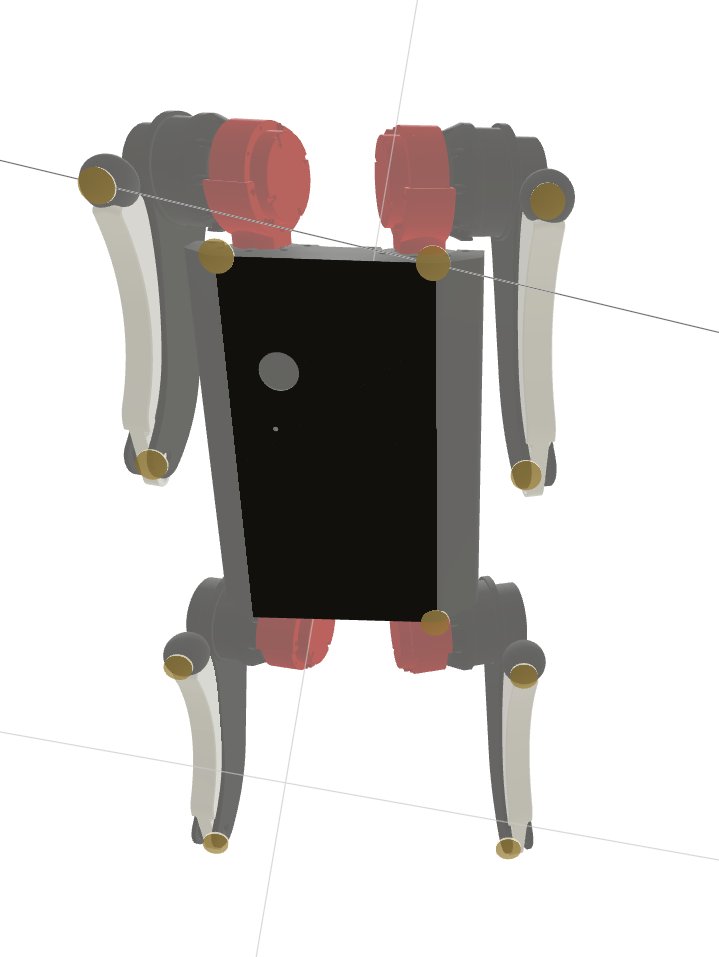
Walking is cool, but the goal is to have one end-to-end policy that controls everything the robot can do, start from any starting position, and be able to reach any desired position (and later do any supported task). Ideally, this should be done without hardcoding joint positions. E.g. the resting position below can be defined as body, feet and knees touching the ground + minimum to no torque, instead of relying on the known joint positions. Rewards become meaningful, instead of arbitrary pose values. It makes you think - what is it really you want to achieve? surely you don't have those radian values in mind, do you? And it makes you do something even harder: prioritize. Are all those goals equal in importance? Is goal A more important than B? quantify "more" please. Playing with the mjlab velocity walking task was a real treat: it just worked out-of-the-box and it's the best way to start. But today I spent some time developing the basis for this new plan, and it required leaving the comfort of Mjlab-Velocity. We'll see how it goes, but (very very small) things slowly begin falling into place and it feels a bit like magic.




excited to announce that we’re open sourcing EGO-SNAKE the largest dataset of egocentric snake pov footage to train the next generation of autonomous vipers comment for a data sample





