We got the following award in IROS 2025:
1. Malek AbuRub, IEEE Robotics and Automation Society Japan Joint Chapter Young Award.
2. Radwa Ali, IEEE Robotics and Automation Society Japan Joint Chapter Young Award
3. Weiwei Wan, Best Reviewer Award,.
5. X. Yuan et al., Preference Aligned Diffusion Planner for Quadrupedal Locomotion Control
6. T. Nishimura et al., Learning Mobile Robot Pushing for Unwanted Object Removal in Dense Clutter (Late Breaking).
3. H. Chen et al., Automatically Prepare Training Data for YOLO Using Robotic In-Hand Observation and Synthesis(TASE)
4. H. Nagai et al., “Assembly Sequence Planning Considering Robotic Motion Costs and Multi-Operation Constraints
We had the following presentations in IROS 2025:
1. M. Aburub et al, Functional Eigen-Grasping Using Approach Heatmaps(RA-L)
2. J. Zhang et al., Integrating a Pipette into a Robot Manipulator with Uncalibrated Vision and TCP for Liquid Handling(TASE)
--continue on thread
We are awarded in RSJ conference:
優秀講演賞:瀧谷,粘弾性可変なIonPadグリッパの開発
小山,XY-Z分離計測による薄型食品の高速バラ積みピッキング
Wang, Finalist for International Session Best Presentation Award
ICRA 2025が始まりました。研究室からは以下の発表があります
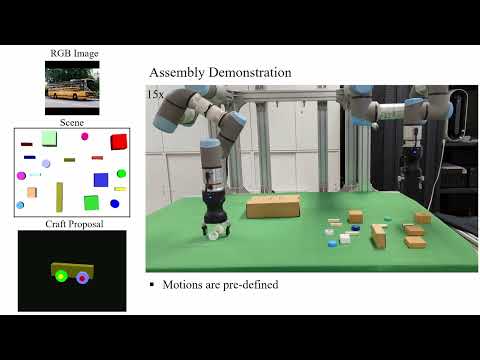
Victor H. Isume et al., “Component Selection for Craft Assembly Tasks,”
Hao Chen et al., “Adaptive Grasping of Moving Objects in Dense Clutter via Global-to-Local Detection and Static-to-Dynamic Planning,”
We will make 2 technical presentations, 1 keynote talk, 1 workshop talk, 1 late breaking talk, 1 exhibition and 1 robotic challenge in the forthcoming ICRA