Angehefteter Tweet

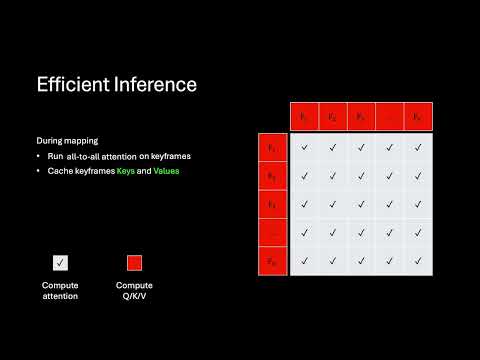
How can we run reconstruction models like π³ and Depth Anything 3 in real-time?
We present KV-Tracker, a training-free approach, for real-time tracking of scenes and objects. Achieving up to 30 FPS!
With @alzugarayign, @makezur, @XinKong_IC and @AjdDavison
English