固定されたツイート

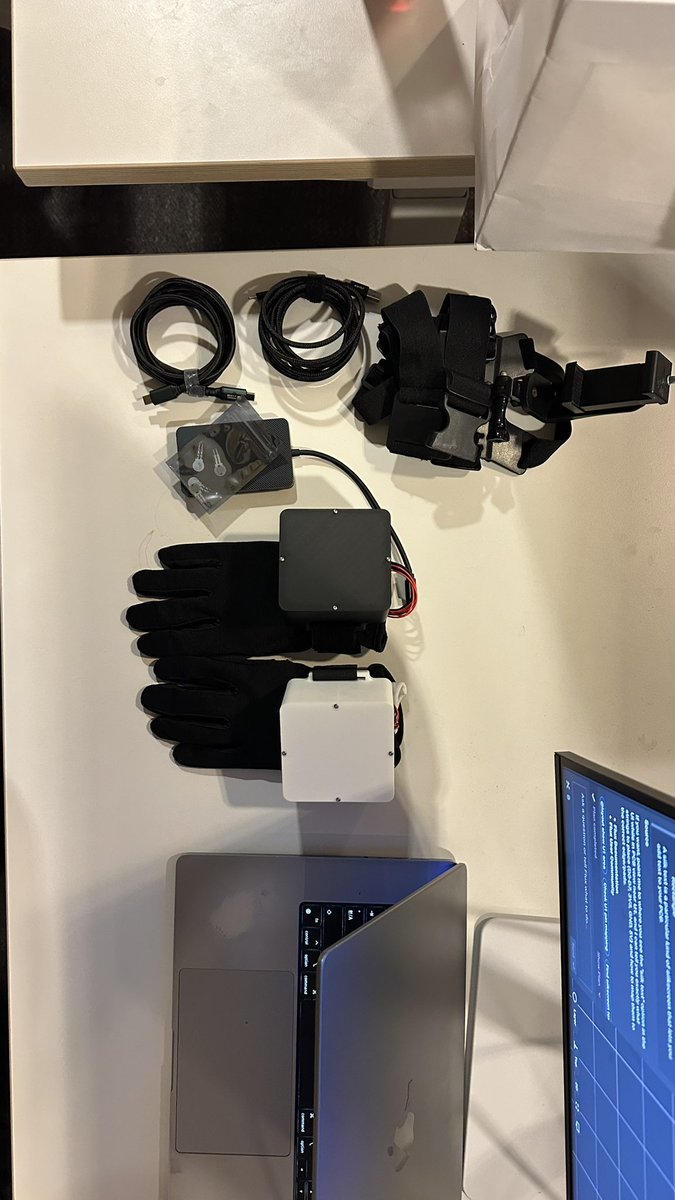
Introducing the Tactile Data Engine - the frontier dataset for robotics.
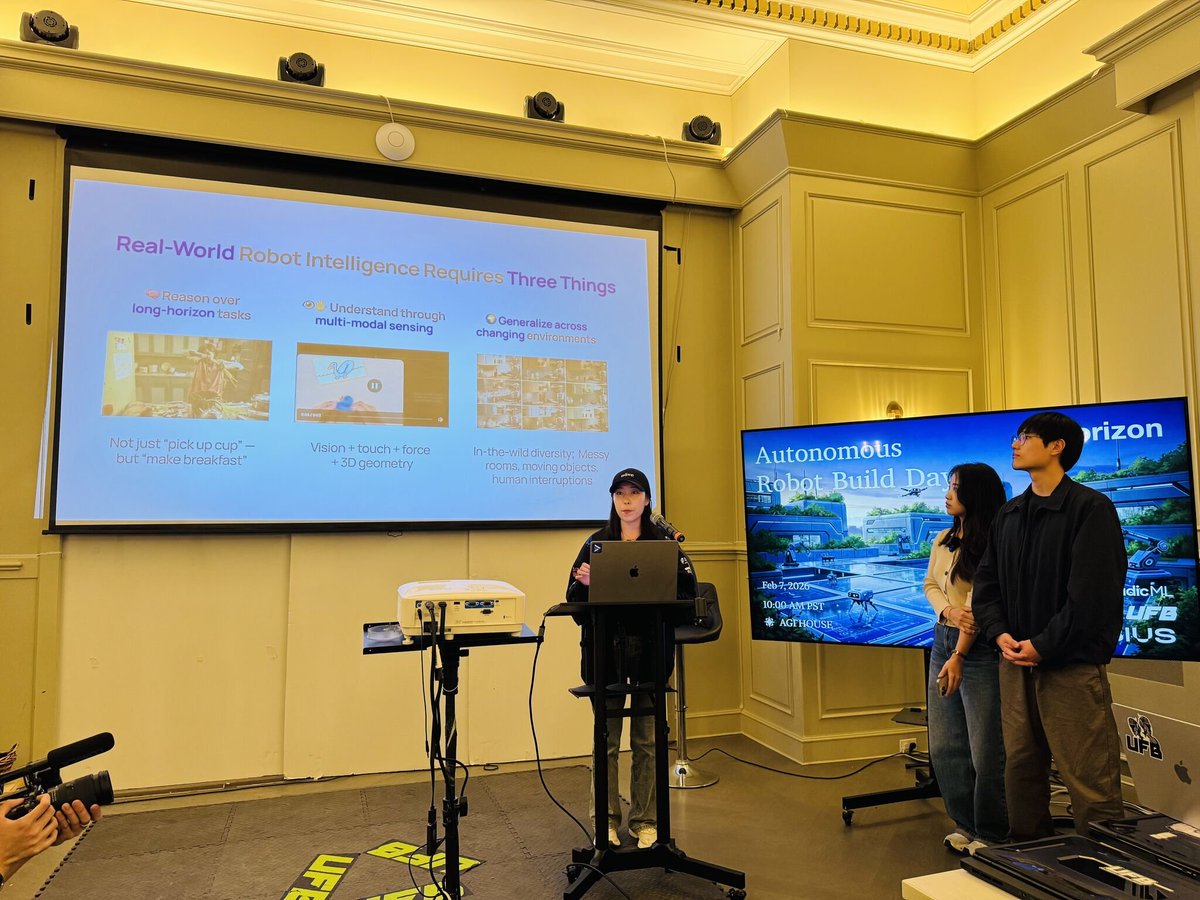
Tactile sensing is the new modality for next-generation robot training and world models, enabling robots to understand physical interaction beyond vision.
Let’s get to the next level 🚀
English