Se June Joo 리트윗함

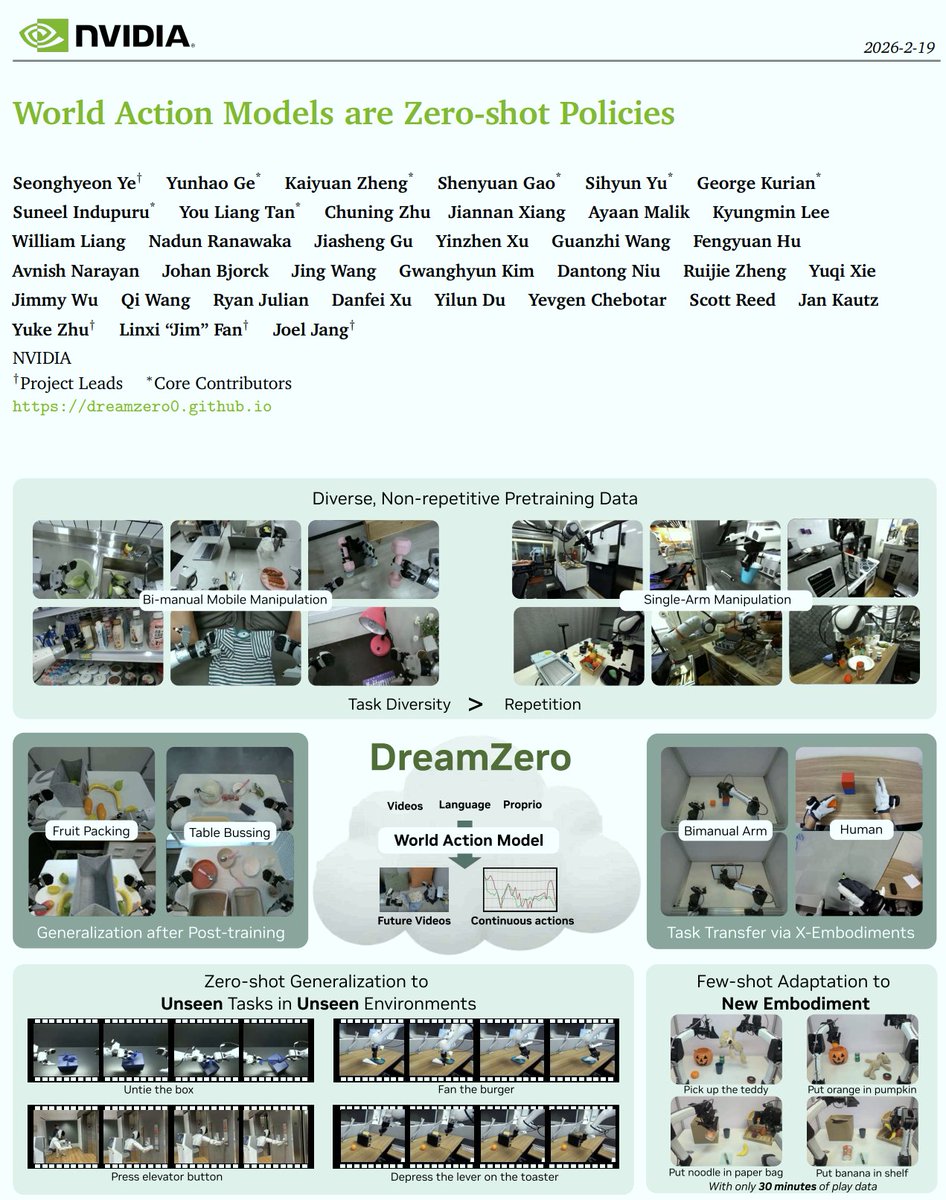
VLAs (from VLMs) ❌ => WAMs (from Video Models) ✅
Why WAMs?
1️⃣ World Physics: VLMs know the internet, but Video Models implicitly model the physical laws essential for manipulation.
2️⃣ The "GPT Direction": VLAs are like BERT (rely heavily on task-specific post-training). WAMs are like GPT (pre-train & prompt), unlocking incredible zero-shot transfer!
What I want to see in 2026:
📈 Scaling Laws: We will see much clearer scaling laws for robotics compared to VLAs.
🤝 Human-to-Robot Transfer: Unlocking massive transfer capabilities using video as a shared representation space.
🤖 Zero-Shot Mastery: Moving from short-horizon tasks to long-horizon, dexterous manipulation without task-specific demonstrations.
We recently open-sourced the checkpoints, training and inference code.
Dive into the research! 👇
📄 Paper: arxiv.org/abs/2602.15922
💻 Code: github.com/dreamzero0/dre…
🤗 HF: huggingface.co/GEAR-Dreams/Dr…
English