Sabitlenmiş Tweet

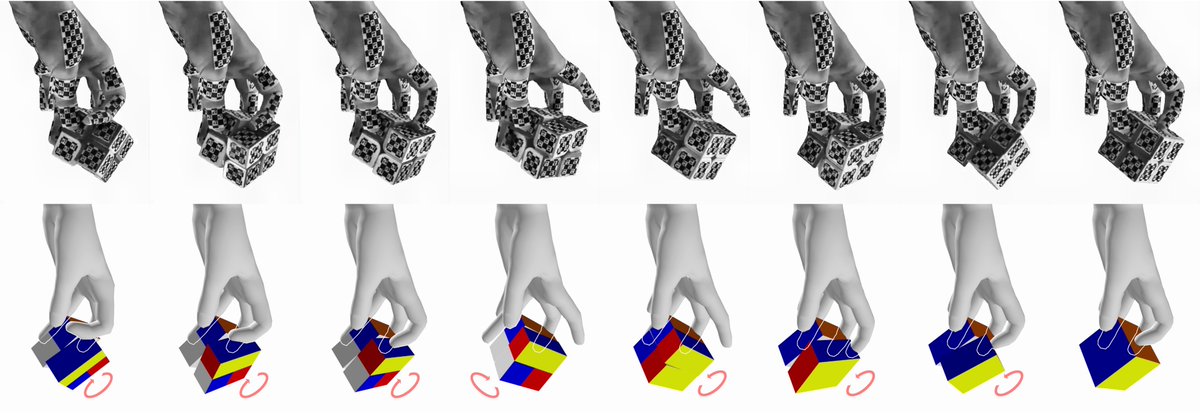
🚀Introducing GMT — a general motion tracking framework that enables high-fidelity motion tracking on humanoid robots by training a single policy from large, unstructured human motion datasets.
🤖A step toward general humanoid controllers.
Project Website: gmt-humanoid.github.io
Paper PDF: gmt-humanoid.github.io/resources/gmt.…
Code & Examples: github.com/zixuan417/huma…
This work is co-led by me and @jimazeyu, in collaboration with @xuxin_cheng, @Xuanbin_Peng, @xbpeng4, and @xiaolonw
English