Sabitlenmiş Tweet

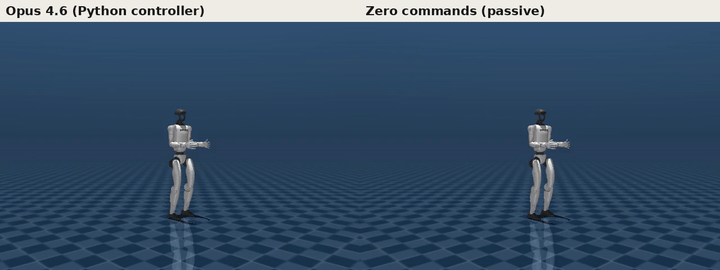
Humanoid Robots
As intelligent automation systems, they are embedded within existing upstream and downstream processes, complementing and enhancing the capabilities of full-chain automation, such as production lines and warehouses.
As auxiliary assistants, collaborating with humans and participating in human-led work and life, humanoid robots are learning and evolving from their masters, evolving from passive to active.
As remote agents: Humans control robots through AR/VR and brain-computer interfaces, while humanoid robots act on their behalf, handling extreme tasks and meeting the human's needs.
As complete agents: Humans empower the robots(AI), understanding their intentions, patterns, and preferences, autonomously planning and executing tasks, and establishing a symbiotic relationship with them.
As human-machine symbionts: Humanoid robots' hands, legs, and other parts of the human body enhance the human being.
As a replica of the human, embedding human memories, knowledge, experience, ego, and superego,a digital copy,within the human body,a kind of superhuman and real-world immortality.

English