Omini
211 posts


Omini retweetledi

CPU vs GPU vs TPU vs NPU vs LPU, explained visually:
5 hardware architectures power AI today.
Each one makes a fundamentally different tradeoff between flexibility, parallelism, and memory access.
> CPU
It is built for general-purpose computing. A few powerful cores handle complex logic, branching, and system-level tasks.
It has deep cache hierarchies and off-chip main memory (DRAM). It's great for operating systems, databases, and decision-heavy code, but not that great for repetitive math like matrix multiplications.
> GPU
Instead of a few powerful cores, GPUs spread work across thousands of smaller cores that all execute the same instruction on different data.
This is why GPUs dominate AI training. The parallelism maps directly to the kind of math neural networks need.
> TPU
They go one step further with specialization.
The core compute unit is a grid of multiply-accumulate (MAC) units where data flows through in a wave pattern.
Weights enter from one side, activations from the other, and partial results propagate without going back to memory each time.
The entire execution is compiler-controlled, not hardware-scheduled. Google designed TPUs specifically for neural network workloads.
> NPU
This is an edge-optimized variant.
The architecture is built around a Neural Compute Engine packed with MAC arrays and on-chip SRAM, but instead of high-bandwidth memory (HBM), NPUs use low-power system memory.
The design goal is to run inference at single-digit watt power budgets, like smartphones, wearables, and IoT devices.
Apple Neural Engine and Intel's NPU follow this pattern.
> LPU (Language Processing Unit)
This is the newest entrant, by Groq.
The architecture removes off-chip memory from the critical path entirely. All weight storage lives in on-chip SRAM.
Execution is fully deterministic and compiler-scheduled, which means zero cache misses and zero runtime scheduling overhead.
The tradeoff is that it provides limited memory per chip, which means you need hundreds of chips linked together to serve a single large model. But the latency advantage is real.
AI compute has evolved from general-purpose flexibility (CPU) to extreme specialization (LPU). Each step trades some level of generality for efficiency.
The visual below maps the internal architecture of all five side by side, and it was inspired by ByteByteGo's post on CPU vs GPU vs TPU. I expanded it to include two more architectures that are becoming central to AI inference today.
👉 Over to you: Which of these 5 have you actually worked with or deployed on?
____
Find me → @_avichawla
Every day, I share tutorials and insights on DS, ML, LLMs, and RAGs.
GIF
English
Omini retweetledi

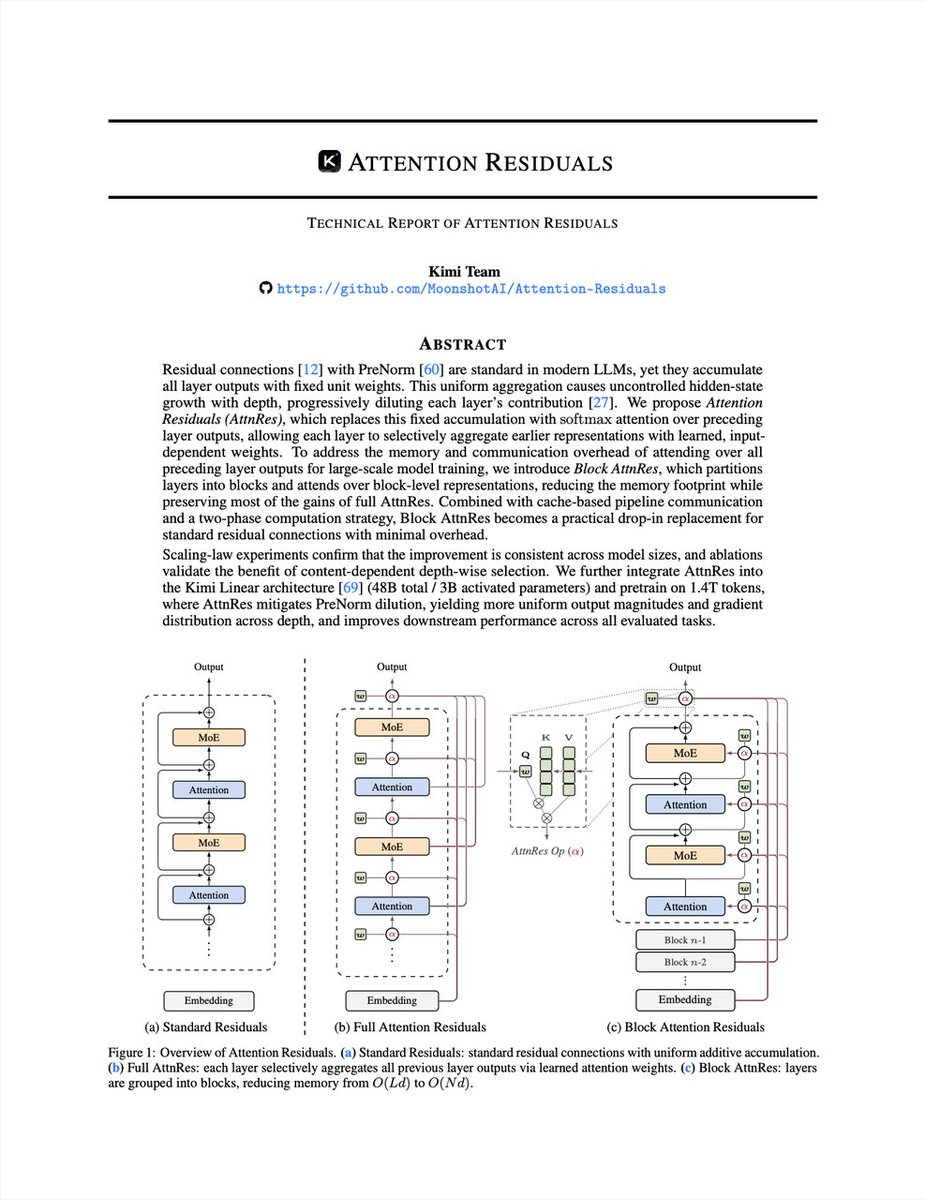
Introducing 𝑨𝒕𝒕𝒆𝒏𝒕𝒊𝒐𝒏 𝑹𝒆𝒔𝒊𝒅𝒖𝒂𝒍𝒔: Rethinking depth-wise aggregation.
Residual connections have long relied on fixed, uniform accumulation. Inspired by the duality of time and depth, we introduce Attention Residuals, replacing standard depth-wise recurrence with learned, input-dependent attention over preceding layers.
🔹 Enables networks to selectively retrieve past representations, naturally mitigating dilution and hidden-state growth.
🔹 Introduces Block AttnRes, partitioning layers into compressed blocks to make cross-layer attention practical at scale.
🔹 Serves as an efficient drop-in replacement, demonstrating a 1.25x compute advantage with negligible (<2%) inference latency overhead.
🔹 Validated on the Kimi Linear architecture (48B total, 3B activated parameters), delivering consistent downstream performance gains.
🔗Full report:
github.com/MoonshotAI/Att…
English

The network grows quietly — but the impact keeps expanding.
More nodes
More connections
More value moving across the ecosystem.
With Omini, every new participant strengthens the network and unlocks new opportunities.
The future of decentralized networks is just getting started
English
A strong network doesn’t appear overnight.
It grows through participation, activity, and shared progress
With Omini, every connection helps expand the ecosystem — and every contribution moves the network one step further
The future of decentralized networks is built together

English
Omini retweetledi

Start building with Gemini Embedding 2, our most capable and first fully multimodal embedding model built on the Gemini architecture. Now available in preview via the Gemini API and in Vertex AI.
English

Omini retweetledi
OpenClaw meets RL!
OpenClaw Agents adapt through memory files and skills, but the base model weights never actually change.
OpenClaw-RL solves this!
It wraps a self-hosted model as an OpenAI-compatible API, intercepts live conversations from OpenClaw, and trains the policy in the background using RL.
The architecture is fully async. This means serving, reward scoring, and training all run in parallel.
Once done, weights get hot-swapped after every batch while the agent keeps responding.
Currently, it has two training modes:
- Binary RL (GRPO): A process reward model scores each turn as good, bad, or neutral. That scalar reward drives policy updates via a PPO-style clipped objective.
- On-Policy Distillation: When concrete corrections come in like "you should have checked that file first," it uses that feedback as a richer, directional training signal at the token level.
When to use OpenClaw-RL?
To be fair, a lot of agent behavior can already be improved through better memory and skill design.
OpenClaw's existing skill ecosystem and community-built self-improvement skills handle a wide range of use cases without touching model weights at all.
If the agent keeps forgetting preferences, that's a memory problem. And if it doesn't know how to handle a specific workflow, that's a skill problem. Both are solvable at the prompt and context layer.
Where RL becomes interesting is when the failure pattern lives deeper in the model's reasoning itself.
Things like consistently poor tool selection order, weak multi-step planning, or failing to interpret ambiguous instructions the way a specific user intends.
Research on agentic RL (like ARTIST and Agent-R1) has shown that these behavioral patterns hit a ceiling with prompt-based approaches alone, especially in complex multi-turn tasks where the model needs to recover from tool failures or adapt its strategy mid-execution.
That's the layer OpenClaw-RL targets, and it's a meaningful distinction from what OpenClaw offers.
I have shared the repo in the replies!
English
Omini retweetledi

At CIIE, Alibaba Cloud and Dun & Bradstreet explored AI + Data for global growth! Dr. Pei Shen: Overseas insights = "Amap" for teams. AI shifts: Talent as collaborators, smart processes, iterative culture. Partnering for data-cloud innovation!
English