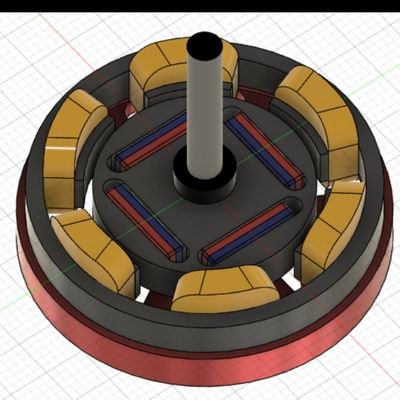
Sabitlenmiş Tweetpomiou@POMIOU·7 Şub部品削り出し、アルマイト、巻線からなにから自作にこだわったipmモーターです。よく回ります🙂Çevir 日本語21620211.5K8
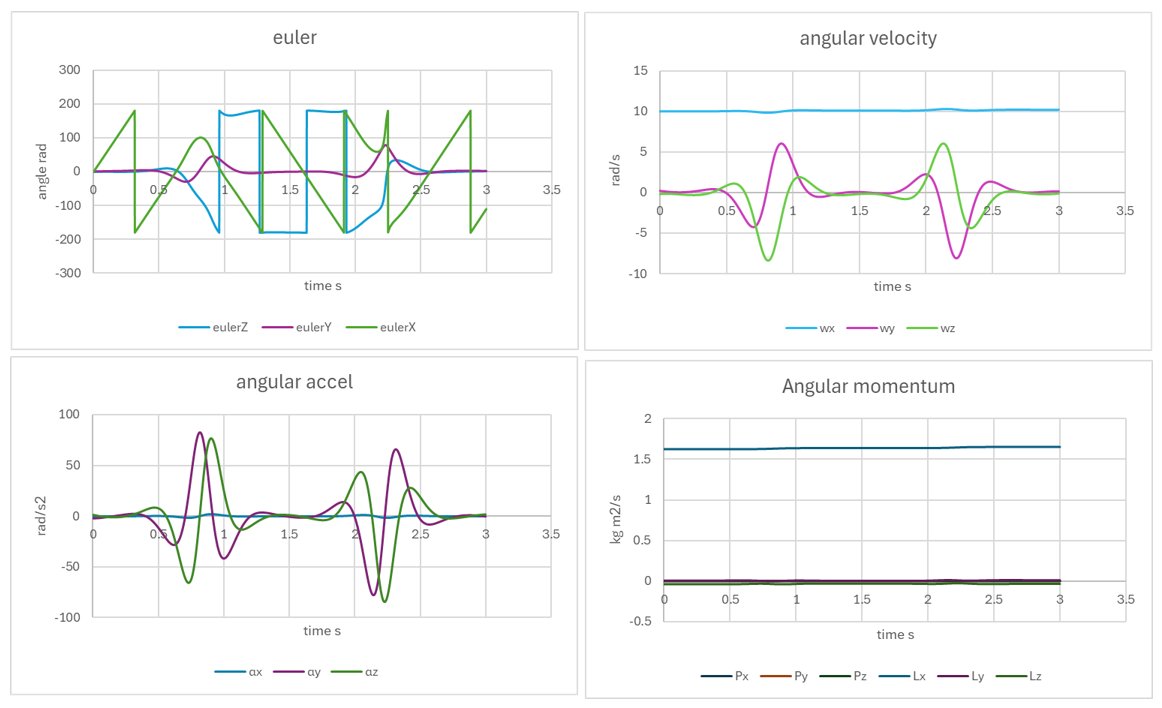
pomiou@POMIOU·31 Ara宇宙でペンチを回すとジャニベコフ効果で反転する剛体運動シミュレーション 角加速度が0にならないけど角運動量はちゃんと保存されているÇevir 日本語0043001
pomiou@POMIOU·19 Ara四足歩行にリメイク ANYmalみのある直鎖リンクの脚にしてみた。イナーシャは増えるが自作リンク機構はsim2realに向かないと判断Çevir 日本語0053031
pomiou@POMIOU·6 Ara脚駆動テスト ここまで作って、2足歩行に対してはトルク不足というのと、自作4節リンク構造はややロスとばらつきがありそうでモデルフレンドリーじゃないので四足歩行にリメイクしたい気持ちÇevir 日本語01271.4K3
pomiou@POMIOU·26 Eki作業空間で位置姿勢制御 1つ目は位置制御のみで、円が歪む 2つ目は重力補償込みで、重力外乱を大体消せている 3つ目は姿勢制御で最初怪しいけど大体制御できてるÇevir 日本語0014161
pomiou@POMIOU·26 Ekiニュートンオイラー法をお勉強で書いたのでRNEAベースの動力学シミュレーションを作ってみた 3関節ロボットアーム、トルクなしだと振り子状態になるÇevir 日本語0023791
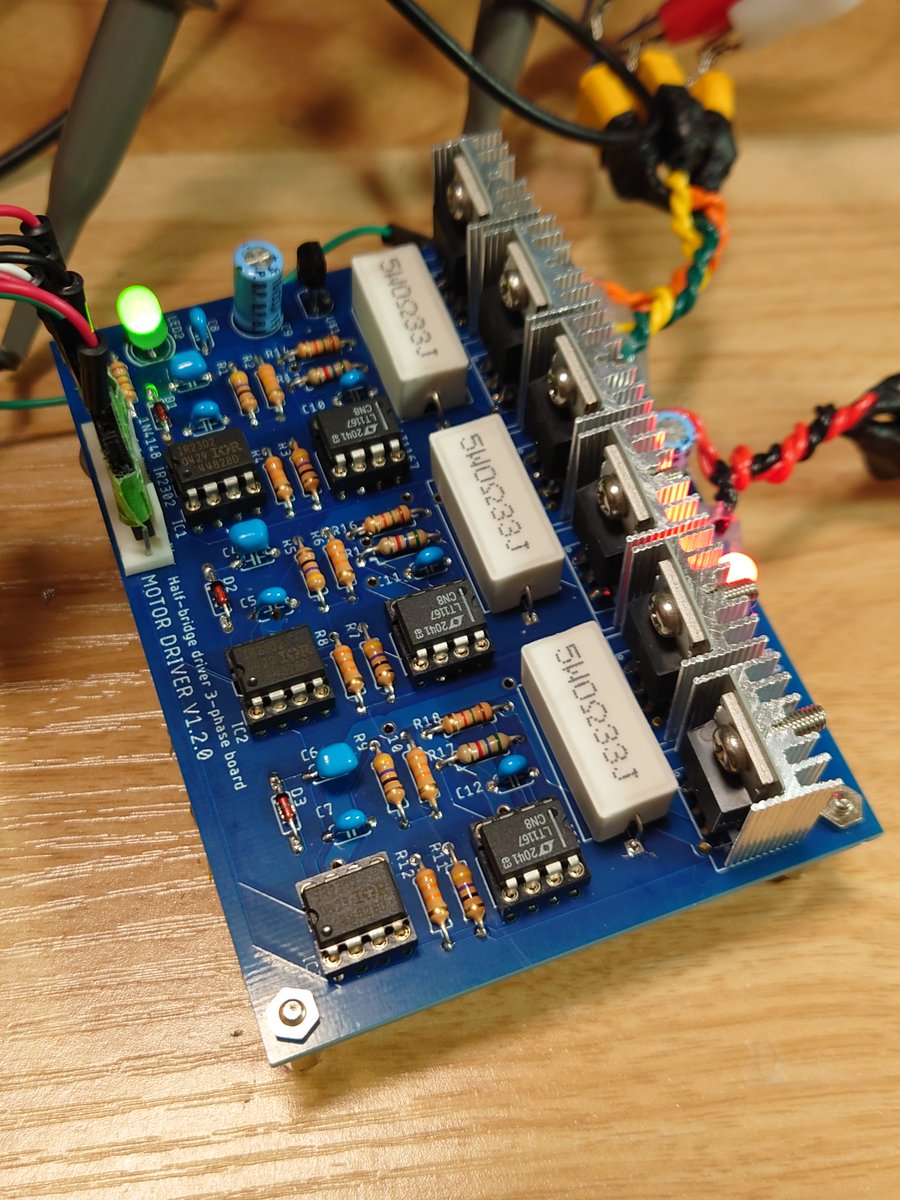
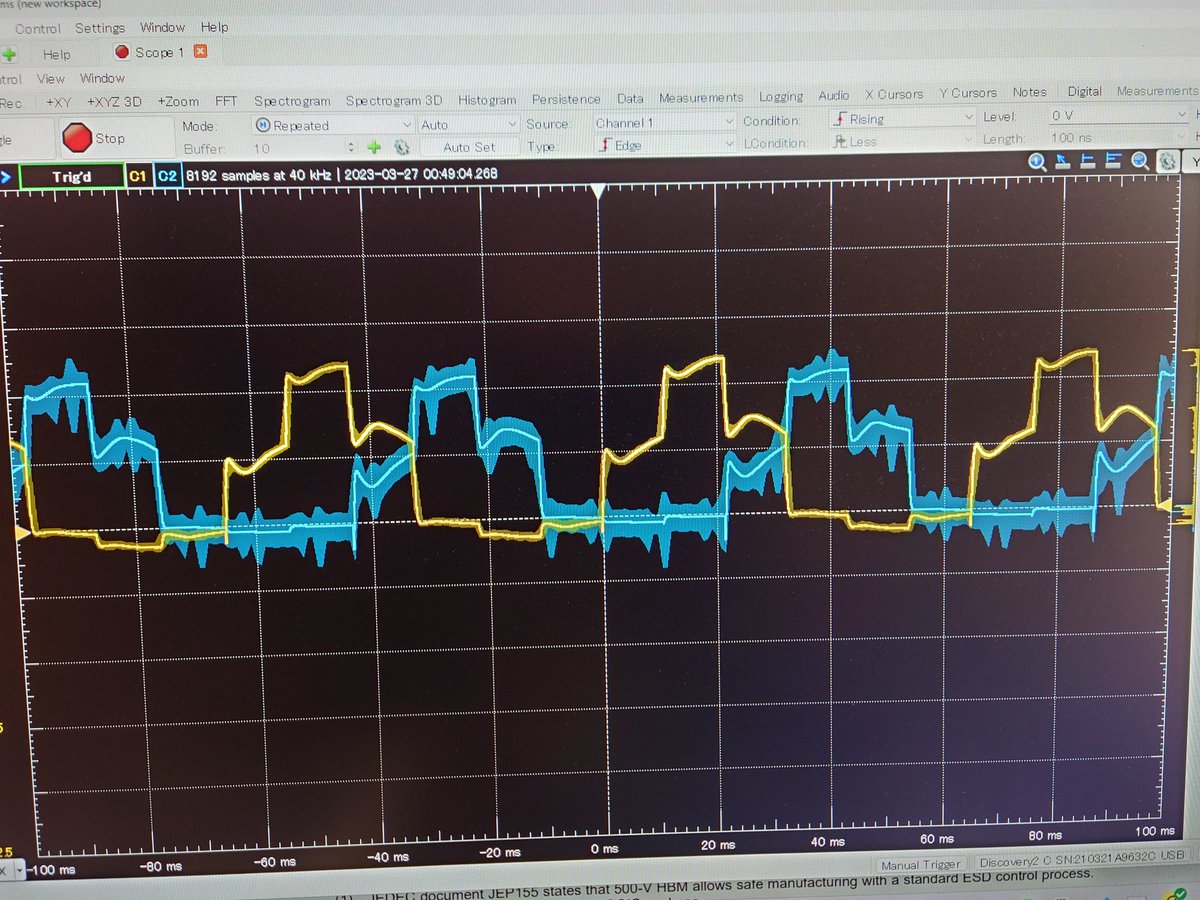
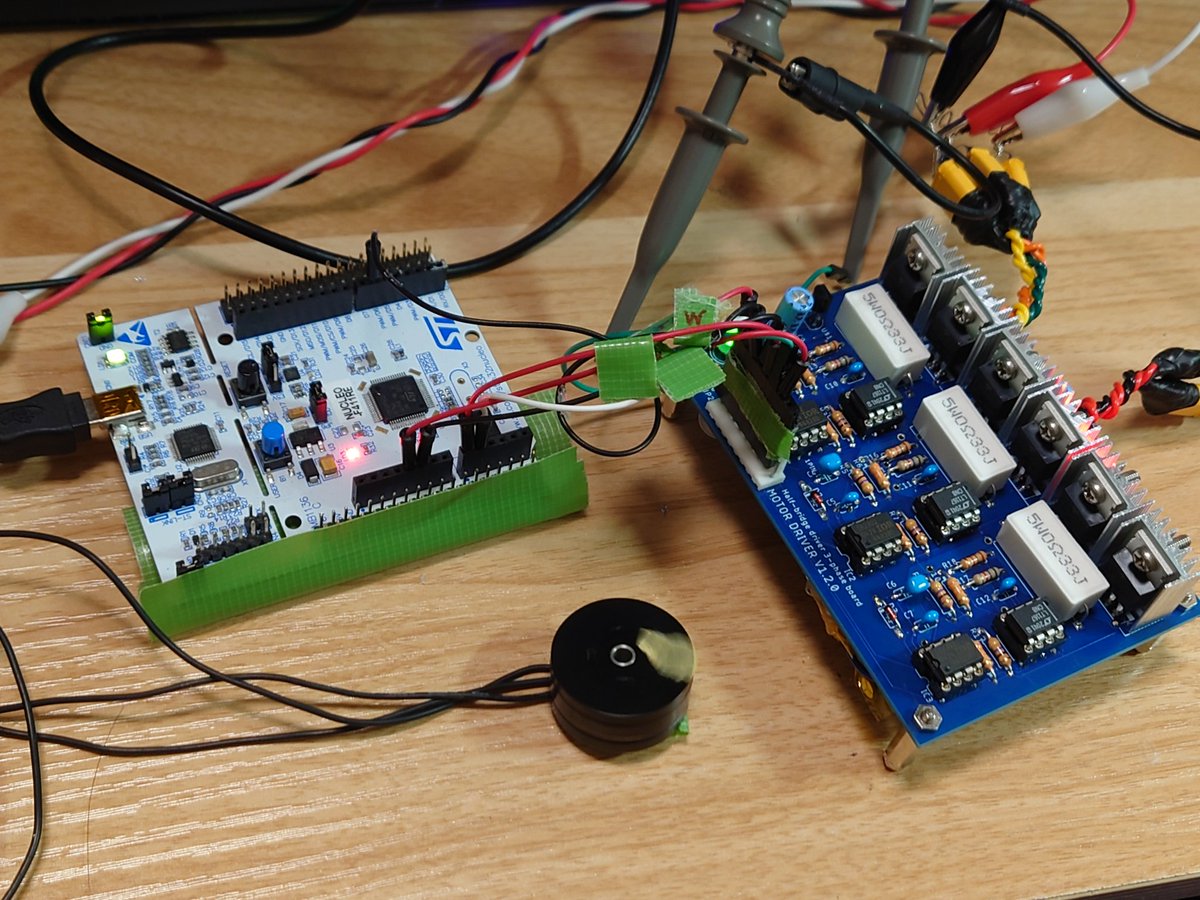
pomiou@POMIOU·5 Ağu@MTxG0LiTWawHxXU はい、その通りです! 各相のローサイド側を見ています。 オペアンプについては横着して外付け抵抗でゲインを決められる計装アンプICを使っています。Çevir 日本語00045
ねぎま2nd@MTxG0LiTWawHxXU·4 Ağu@POMIOU 電流検出をどのようにされているかが気になります。 セメント抵抗とオペアンプで各相のGND側の電流値を読み取っているのでしょうか?Çevir 日本語10039
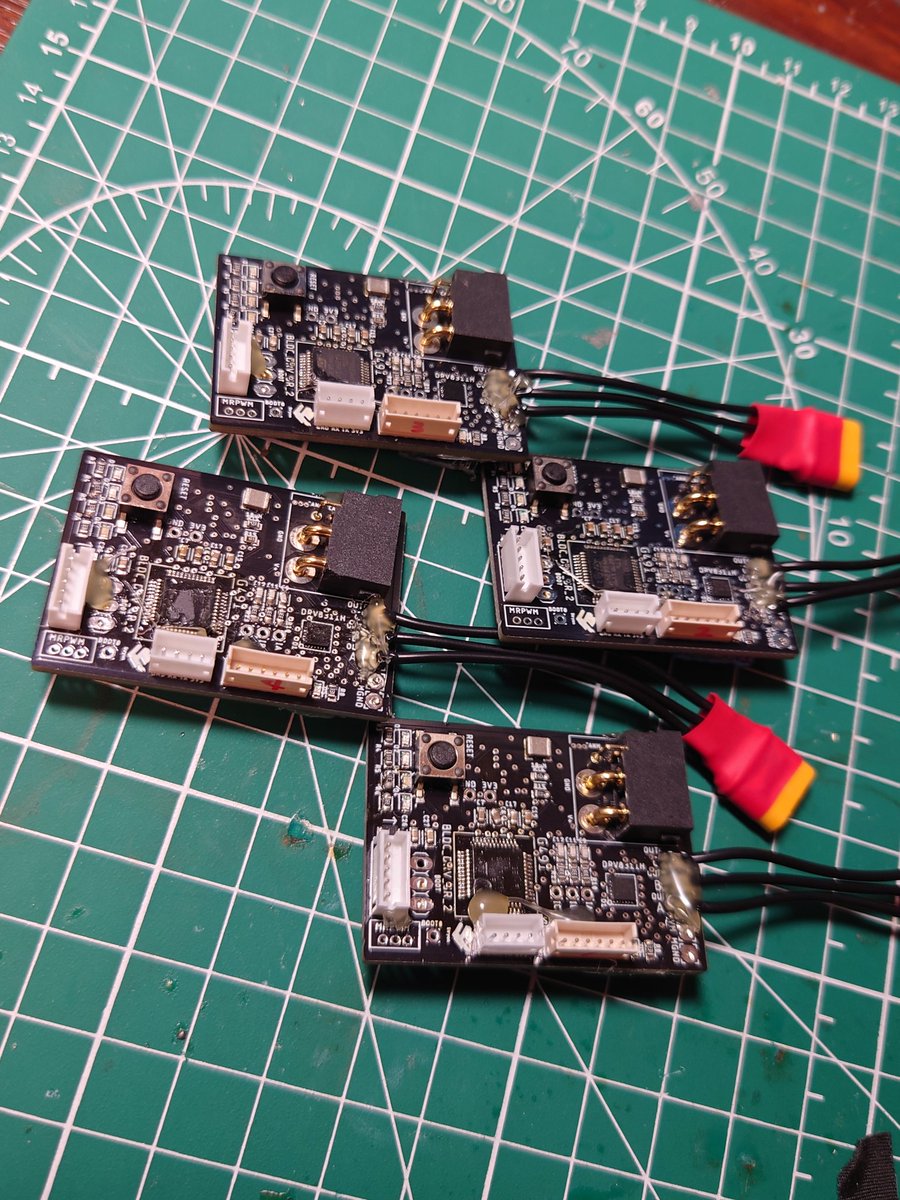
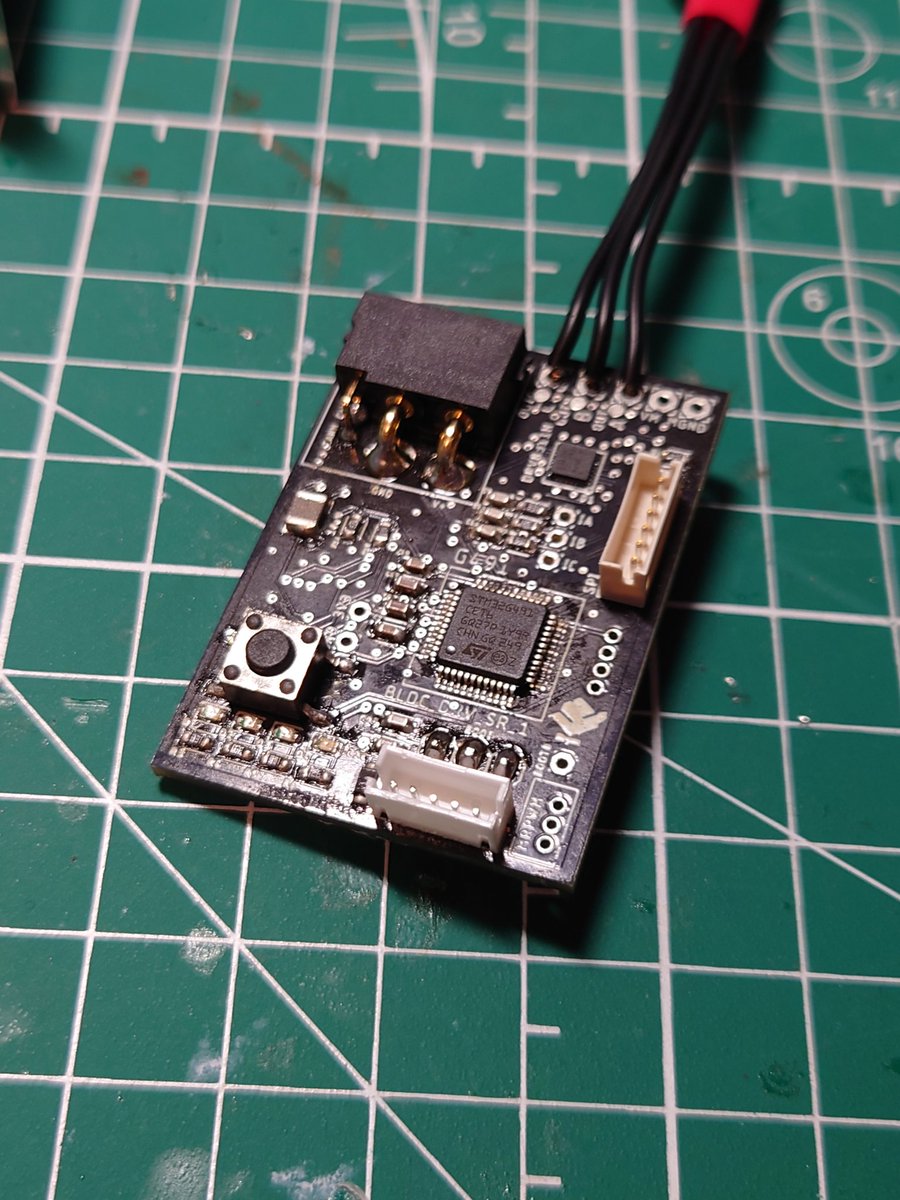
pomiou@POMIOU·3 TemBLDC制御基板ver2 DCDC、LDO、CANトランシーバを追加してロボコン用に対応 とにかく安くするため両面基板のままレイアウトÇevir 日本語00119102