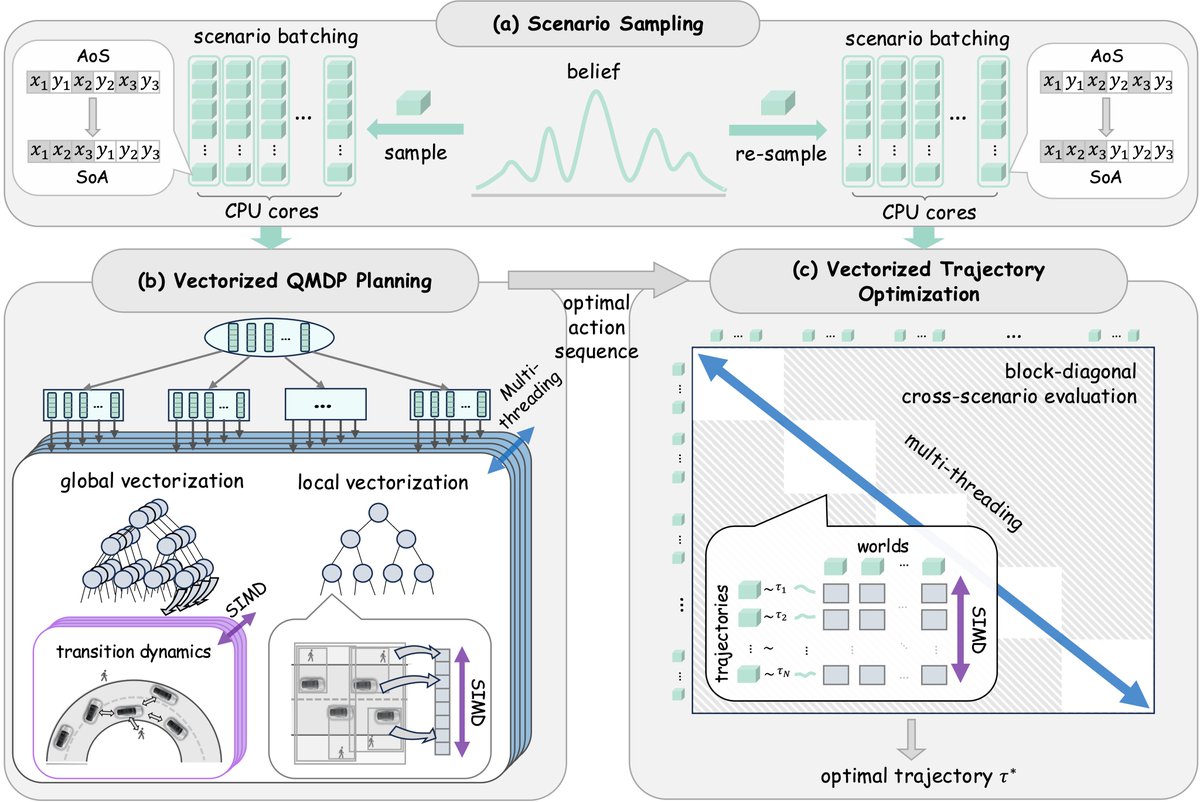
This is Vec-POMDP:
✅ A CPU-native parallel POMDP planner
✅ Multi-threading + global vectorization + local vectorization + SIMD
✅ 227×–1073× speedup
Website: sii-boluomonster.github.io/VecQMDP-websit…
Paper: arxiv.org/abs/2602.08334
Code: github.com/SII-BoluoMonst…
Română