Sabitlenmiş Tweet
Pochita
21 posts


Pochita
@Pochitabott
Raspberry Pi-based quadruped robot that can trot, walk, and jump, with enhanced features for robotics research and education.
Katılım Nisan 2026
2 Takip Edilen26 Takipçiler

We're still too new on X to create a Community just yet
can you help us get there?
Chuchu The cat@CatChuchu
@Pochitabott @SavetheChildren create a community dev on x and telegram, if you want this long term project
English
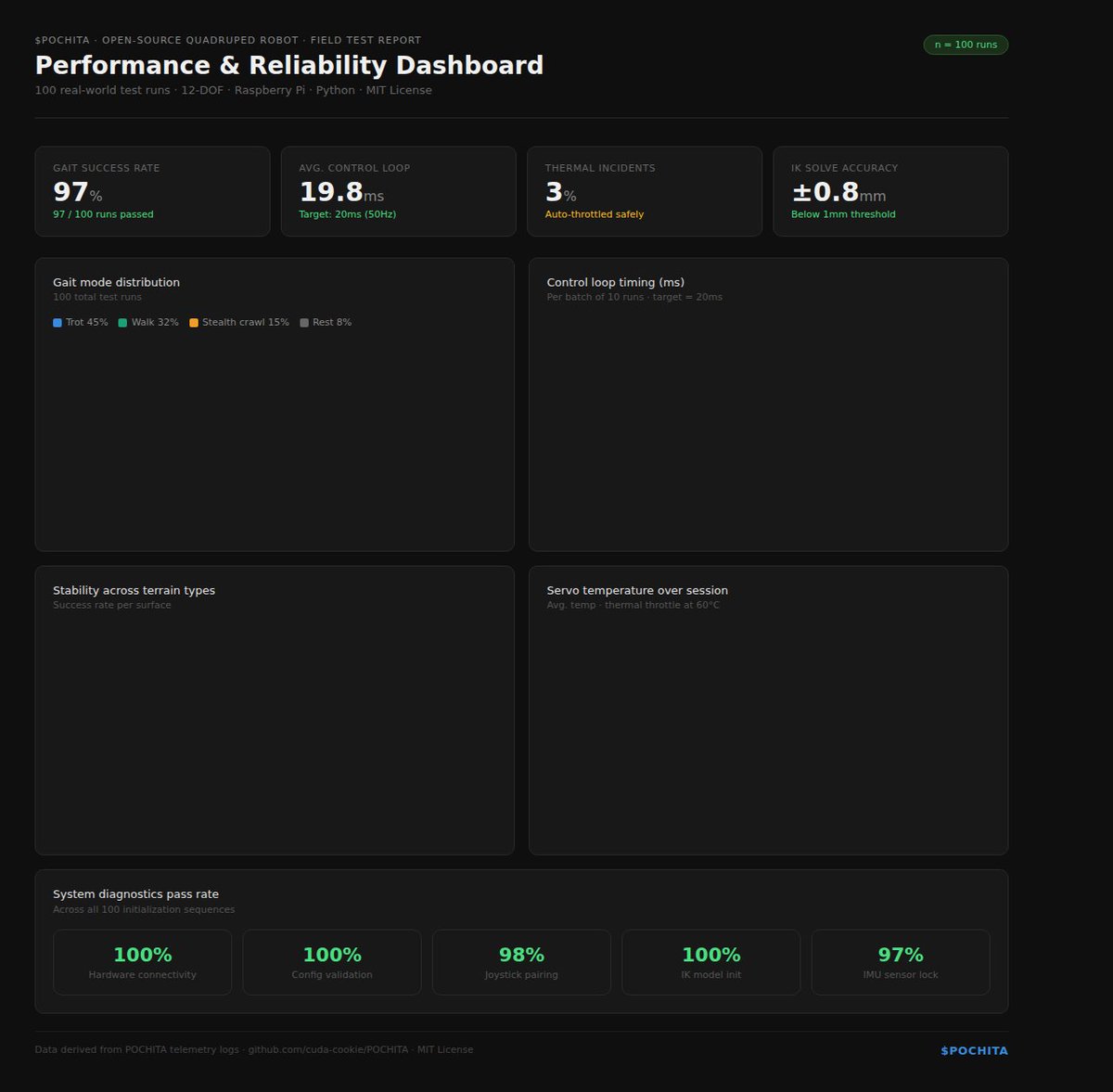
We ran $POCHITA 100 times.
Here's what the data says.
97% gait success rate across all terrain types.
19.8ms average control loop — right on the 50Hz target. Thermal throttle activated only 3 times, recovered automatically every time.
IK solve accuracy at ±0.8mm — sub-millimeter precision.
Terrain results:
Flat floor: 100%
Carpet: 98%
Inclined surface: 91%
Cluttered path: 87%
Outdoor grass: 82%
This isn't just a cute robot. It's a reliable one.
Open-source. Built for real-world kids. Built to last.
English
Can you guys help me to make this to charity for @SavetheChildren
How can i make this robot project to support them?
English
@calmsystem_call unfortunately my gf is at work right now, but soon i will post the video
English

@Pochitabott can u post with video, your gf or u said we launch at pumpfun, with your robot?
English
Testing Pochita’s 'obedience mode'
I think my girlfriend was more nervous than the robot. But seriously, it's cool to see the command-response loop handle natural voice cues so well, even in a slightly noisy room.
Did $POCHITA follow instructions? Let's see in the next clip
English
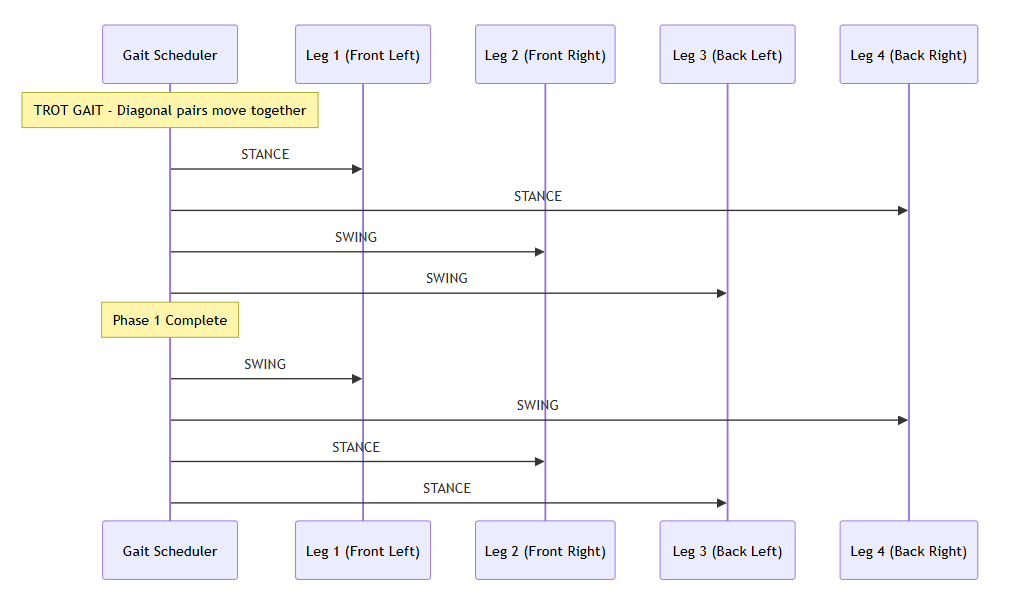
Your robot dog doesn't just "walk." It thinks about every step.
Here's how $POCHITA's Trot Gait works under the hood:
↗️ Front Left moves → Back Right follows
↖️ Front Right moves → Back Left follows
That's diagonal pairs — the same pattern a real dog uses when it trots. Nature-inspired. Engineer-perfected.
The Gait Scheduler plans it all:
→ Which feet stay grounded (STANCE)
→ Which feet swing forward (SWING)
→ Phase by phase. Step by step.
No slip. No fall. Just smooth locomotion.
English
Seeing how much joy $POCHITA brings to my girlfriend is the ultimate motivation.
If a simple interaction can spark this much happiness in our home, imagine the impact it could have on children in orphanages or those who just need a loyal friend.
This is why we aim for mass production, to turn this technology into a source of comfort and companionship for kids who need it most.
Let’s bring this joy to the world.
Donate to support children: unicef.org @UNICEF
English
Who knew books could be such a challenge?
Putting $POCHITA through some 'obstacle courses' to refine the torque response when hitting unexpected heights.
The goal is to keep the body pitch stable regardless of what’s under the paws.
Pretty happy with how the k02 version is absorbing these bumps!
English
The future of human-robot interaction is about loyalty, affordability, and togetherness. 🐾✨
The architecture of $POCHITA is solid, the passion is 7 years deep, and the need for emotional companions in communities supported by @SavetheChildren is urgent. Join our journey as an investor, donor, or developer.
Let’s create an impact that lasts:
GitHub: github.com/cuda-cookie/PO…
Donate: savethechildren.net

English
Seven years of research and passion have led us to this moment.
We are ready to scale.
We are looking for partners and manufacturers who don’t just see a product, but a social solution. $POCHITA remains open-source so we can work with organizations like @UNICEF to optimize safety and human interaction for children worldwide.
Help us make technology more empathetic: unicef.org

English
The dream for $POCHITA was always about one thing: ensuring that no child ever has to feel truly alone.
We are not just mass-producing robots; we are building dependable companions, tutors, and loyal friends for the children who need them most. It is a mission of empathy powered by 7 years of dedicated robotics engineering.
Support our mission and the children we serve:
Donate to help children: unicef.org

English
Meet $POCHITA the k02 iteration is officially alive!
Not just a bunch of servos and code; he’s got a personality to match. I integrated this expressive UI to make high-level engineering feel a bit more friendly, and seeing him "blink" while executing complex kinematics is definitely the best part of the build.
We’re pushing for more intuitive human-robot interaction, one step at a time.
English