Sabitlenmiş Tweet

Most robotics engineers spend more time fixing infrastructure than actually building robots.
That sounded broken to us.
So we started building RoboProtX. ⚡
Today we’re excited to officially share RoboProtX - full-stack robotics infrastructure platform by Robosynx.com
A platform built for robotics engineers who are tired of:
❌ endless SSH sessions
❌ scattered training logs
❌ broken simulations
❌ manually debugging reinforcement learning pipelines
❌ juggling Isaac Sim, MuJoCo, Gazebo & ROS2 separately
So we built ONE unified command center.
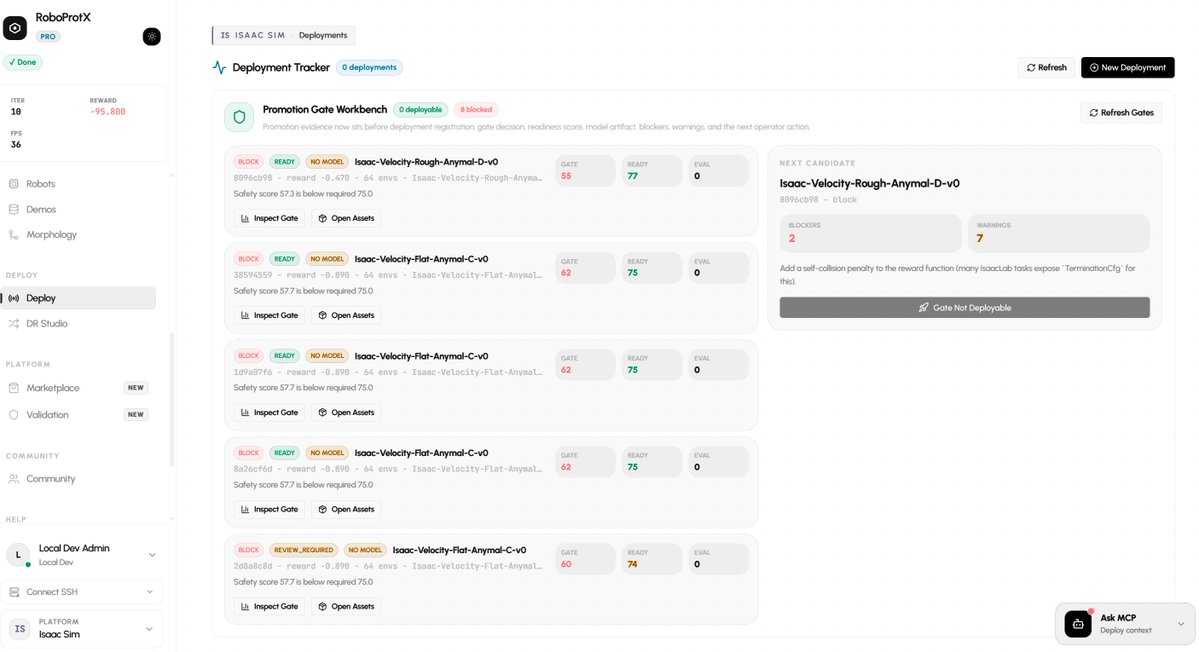
🔥 RoboProtX Features:
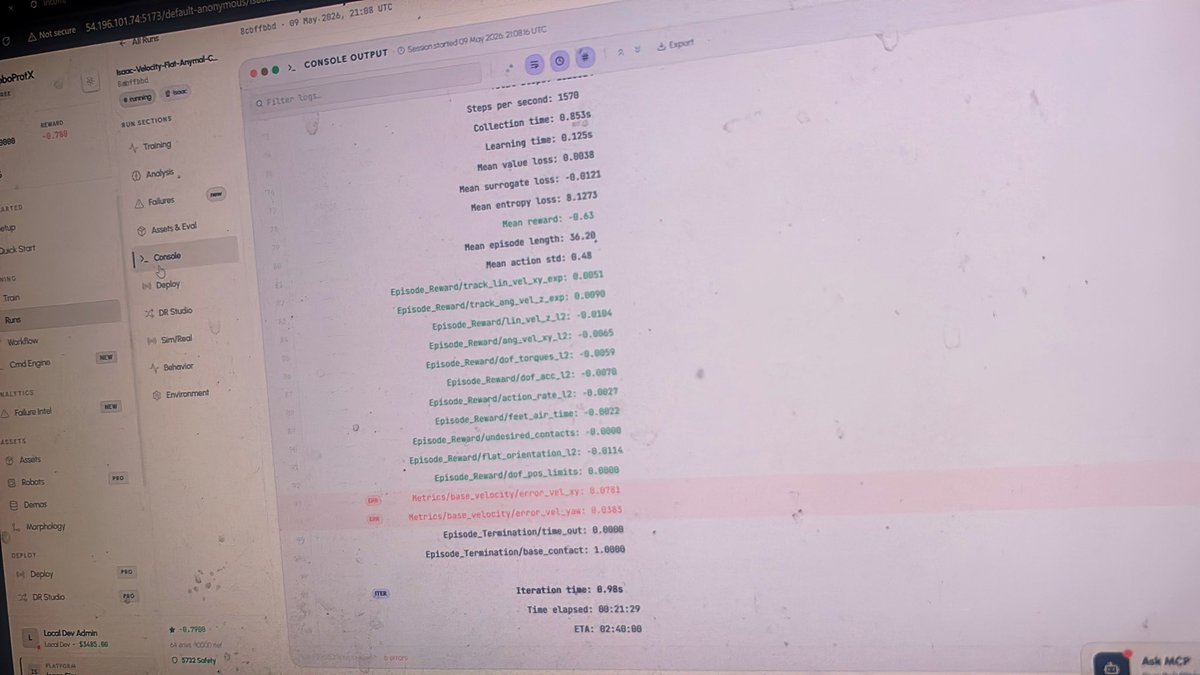
• Live robotics training monitoring
• Real-time GPU telemetry & cluster insights
• Isaac Sim + Isaac Lab integration
• MuJoCo & Gazebo support
• AI-powered training advisor
• Domain randomization workflows
• ONNX / TorchScript model export
• Training launch orchestration
• Reward tracking + run history
• Simulation observability dashboard
• End-to-end sim-to-real workflow support
The goal?
Make robotics development feel like modern software engineering.
And honestly… this is just the beginning.
We’re also super happy to share that we recently secured our first $20,000 in initial funding from friends & family ❤️
No VCs.
No accelerator.
Just belief from people around us who saw the vision early.
That funding is now going directly into:
⚡ infrastructure
⚡ compute
⚡ scaling the platform
⚡ building faster robotics tooling for developers worldwide
If you’re building robots, RL systems, autonomous agents, or simulation tooling — we’d genuinely love your feedback.
The next decade belongs to robotics.
And we’re building for it. 🚀
Join the waitlist - robosynx.com/products/robop…
English