Sabitlenmiş Tweet

🚀 #ICLR2026 Oral 💥
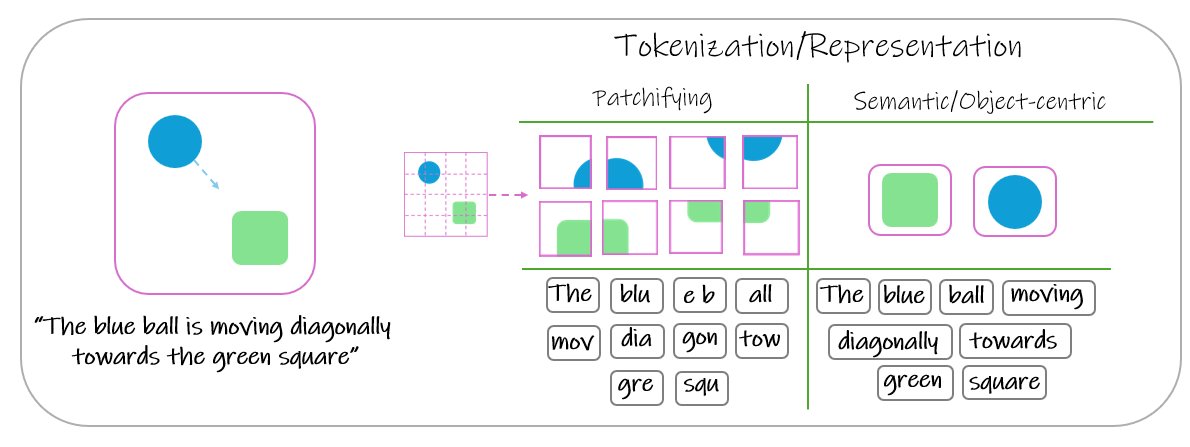
How can we design world models that capture object interactions directly from pixels?
Introducing Latent Particle World Models-the first end-to-end self-supervised, object-centric world model, trained from videos, supporting action/img/lang conditioning.
1/n
English