Sabitlenmiş Tweet

“You can’t make progress until you are able to measure it. Robotics still doesn’t have such a rallying call. No one agrees on anything.” I 💯 agree with the recent post from @DrJimFan.
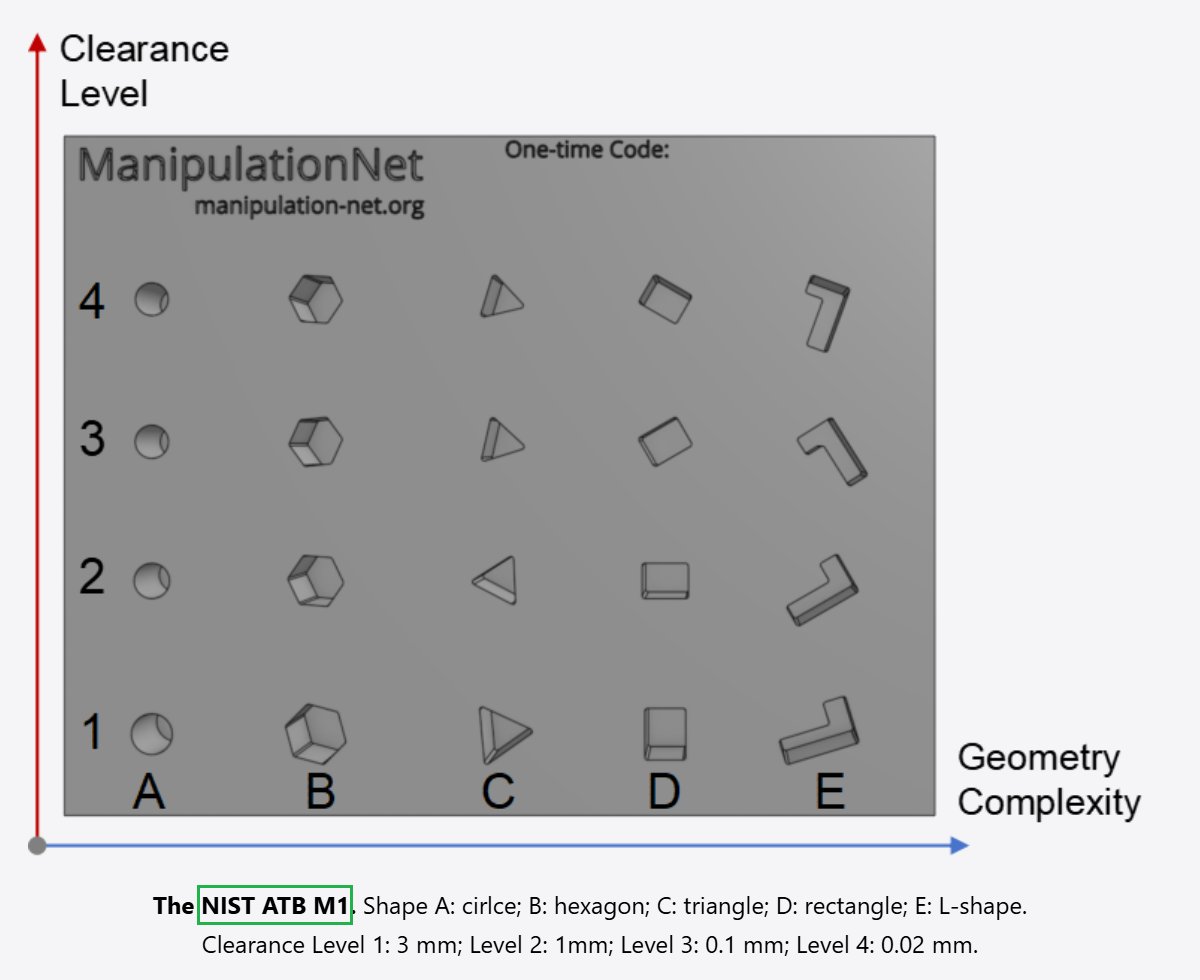
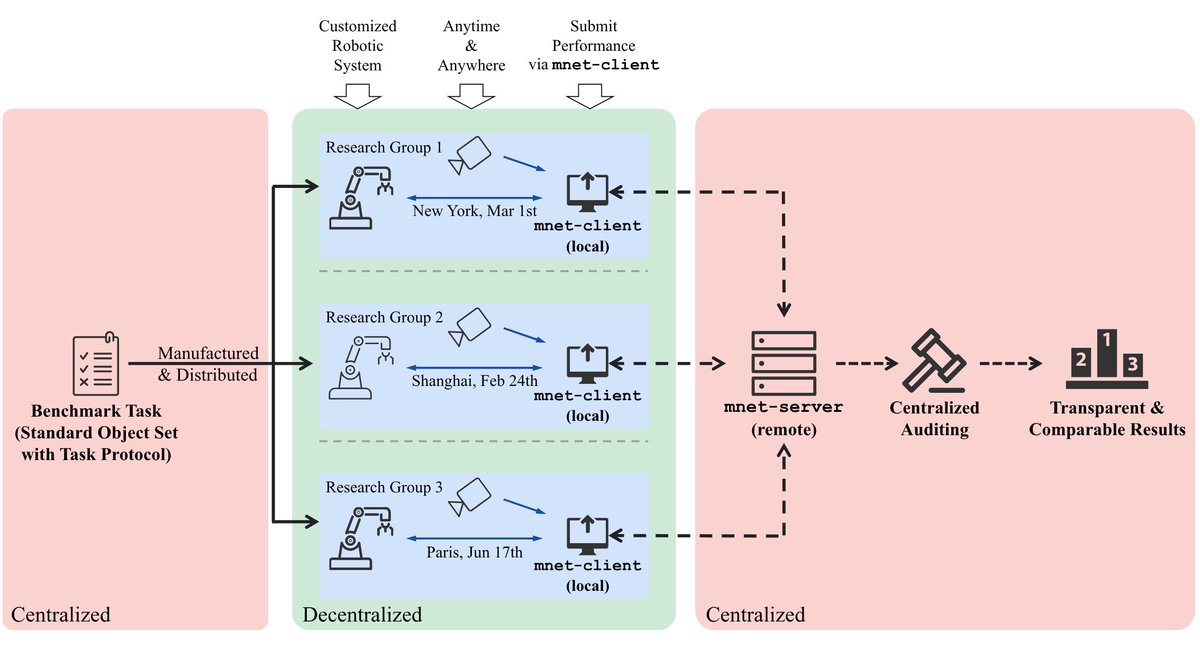
To break this impasse, we are excited to announce ManipulationNet (manipulation-net.org), a community-driven global infrastructure supported by @NIST, that enables benchmarking real-world robot manipulation research at scale with any robot at any time and anywhere on standardized task setups.
ManipulationNet’s key features include:
✅delivers standardized hardware kits globally to support reproducible task setups
✅provides online task instructions in real-time, which could involve visual/language prompts, task-specific instructions, etc..
✅collects authentic manipulation performance for comparable results on global leaderboards
🌍Join the ManipulationNet, let us aim to "connect the dots" of the up-to-date progresses and challenges to construct a network of real-world robot abilities and skills, a network of research roadmaps, and a network of research questions.
Want to learn more about ManipulationNet? Check out the links below:
🔗Project website: manipulation-net.org
🔗Founding Committee and Developer Team: manipulation-net.org/committee.html
🔗Paper: manipulation-net.org/MNet_preprint.…
(1/7)

English