David Klee retweetledi

Closed-loop visuomotor control with wrist cameras is widely adopted and powerful, but leveraging full 3D symmetry from only RGB is still hard.
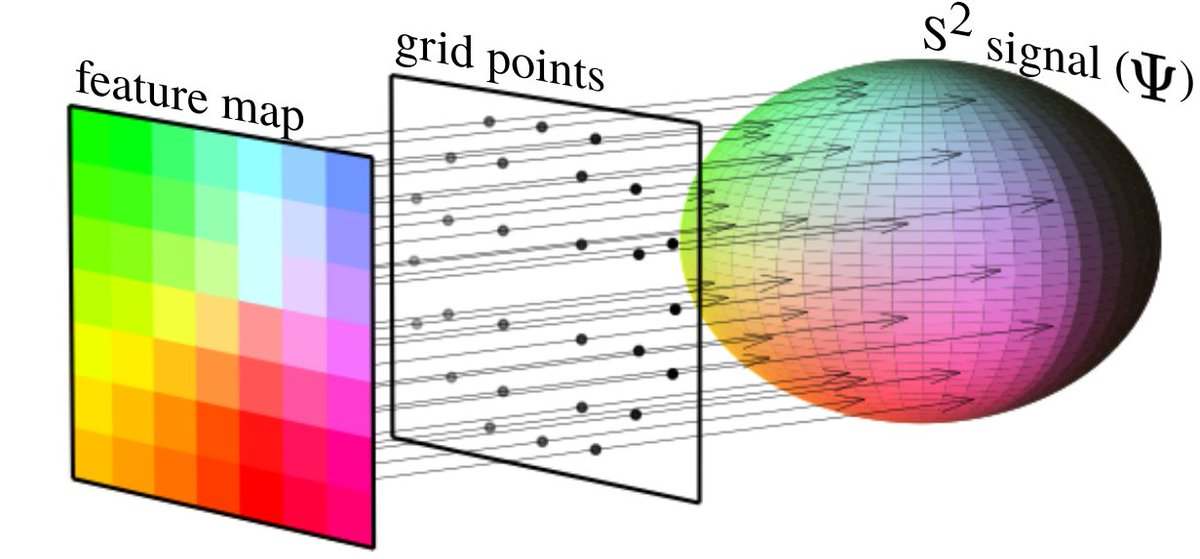
Introducing our #NeurIPS2025 Spotlight paper, Image-to-Sphere Policy (ISP), for equivariant policy learning from eye-in-hand RGB images.
English