
Ansh 🪁
966 posts

Ansh 🪁
@ag7oct
Content writter , learning Crypto daily , @GoKiteAI Golden SBT winner
Katılım Eylül 2022
572 Takip Edilen250 Takipçiler

It’s time for an AMA.
I seriously want to talk with you guys.
Will announce the time ASAP - stay tuned🫡
Abhi.eth@EarnByAbhi
Back from the trip ✈️ Firstly, expect a few things from my side in the upcoming days and week: 1. Distributing 500 - 1000 YOSO codes to my community (wait for the post today). 2. Conducting an AMA (X Space) for something important + guidance for the community. 3. More things Also, Happy Holi in advance - enjoy with your family and friends ❤️ See you.
English
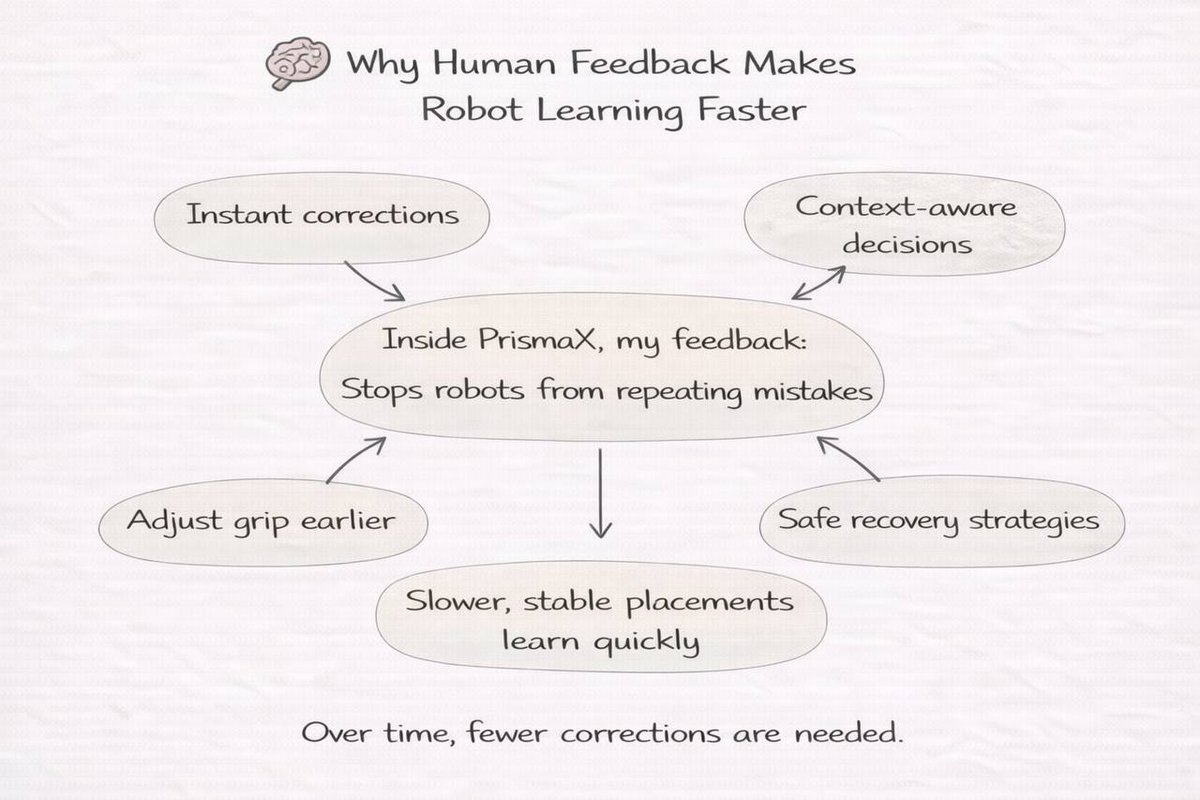
𝐖𝐡𝐲 𝐇𝐮𝐦𝐚𝐧 𝐅𝐞𝐞𝐝𝐛𝐚𝐜𝐤 𝐌𝐚𝐤𝐞𝐬 𝐑𝐨𝐛𝐨𝐭 𝐋𝐞𝐚𝐫𝐧𝐢𝐧𝐠 𝐅𝐚𝐬𝐭𝐞𝐫
One thing becomes very clear after spending time inside PrismaX as a teleoperator where robots learn much faster when humans are part of the loop.
Without human feedback, robots rely only on trial and error.
They repeat mistakes many times before discovering the correct action.
But teleoperation changes that completely.
Practical experience
During a session, a robot was placing small packages into sorting bins.
At first, the robot approached the bin too quickly, causing slight misplacements.
Instead of letting the system repeat the mistake, I slowed the motion and adjusted the entry angle.
Immediately the placement became stable.
From that moment, PrismaX captured:
• The slower trajectory
• The improved entry angle
• The correct timing before release
Ansh 🪁@ag7oct
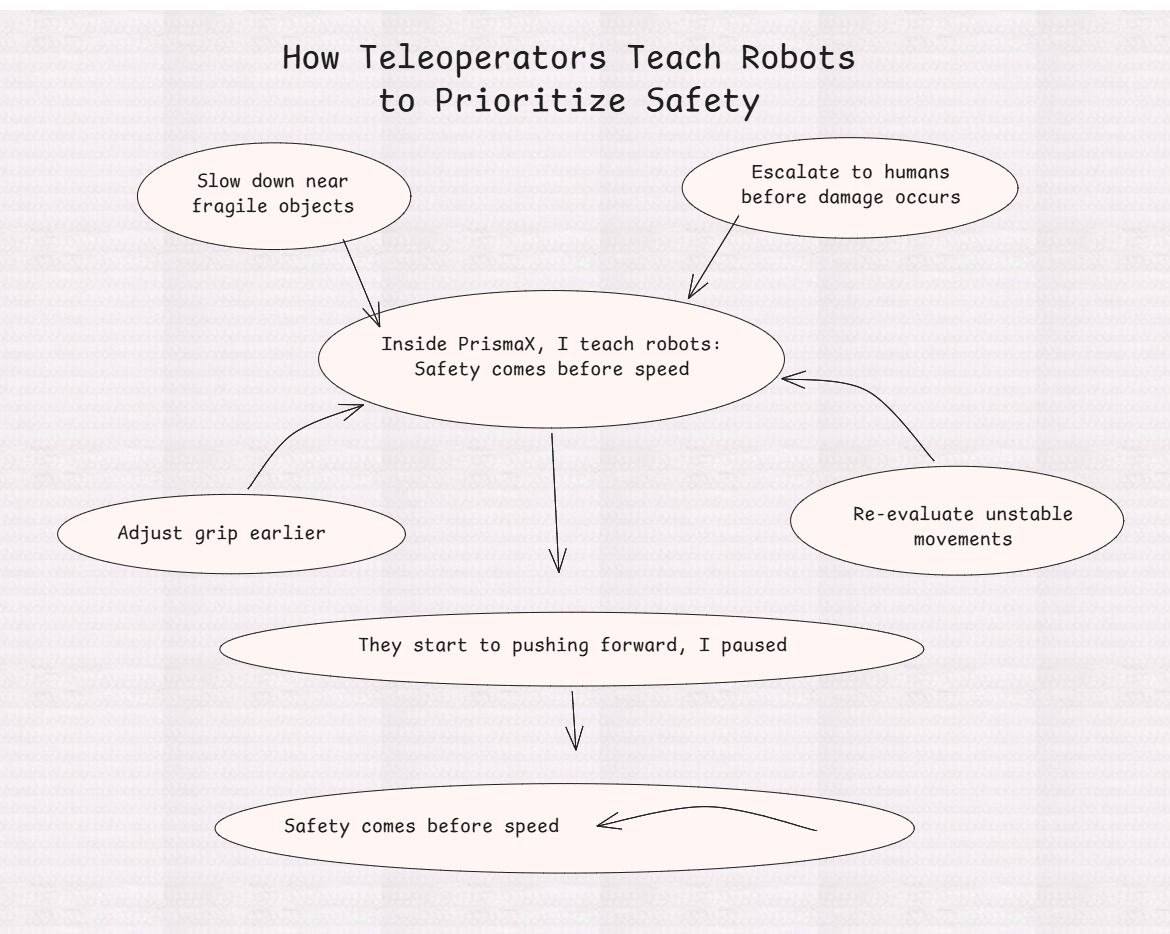
𝐇𝐨𝐰 𝐓𝐞𝐥𝐞𝐨𝐩𝐞𝐫𝐚𝐭𝐨𝐫𝐬 𝐓𝐞𝐚𝐜𝐡 𝐑𝐨𝐛𝐨𝐭𝐬 𝐭𝐨 𝐏𝐫𝐢𝐨𝐫𝐢𝐭𝐢𝐳𝐞 𝐒𝐚𝐟𝐞𝐭𝐲 Inside PrismaX, you quickly realize that completing the task isn’t always the most important goal. Sometimes the smartest move is not finishing the task at all. Practical experience:- During a teleoperation session, a robot was moving a fragile container across a shelf. Everything looked normal at first. But as the robot lifted the container, I noticed something subtle: • The object shifted slightly • The grip wasn’t perfectly centered • The shelf edge was closer than expected Technically, the robot could still try to finish the placement. But instead of pushing forward, I paused the movement and reset the approach. The container was re-gripped and placed safely on the second attempt. This moment matters more than a perfect execution. PrismaX records: • Why the action was paused • What signals indicated risk • How the safer strategy was chosen Over time, robots begin to learn something critical: Safety is not a constraint it’s a decision rule.
English
Ansh 🪁 retweetledi

Introducing - Lucid Agent
Autonomous AI powered by Kimi, MiniMax, DeepSeek, Claude & more.
1-click deploy • Enterprise security • Vetted plugins & skills repo.
Autonomous trading: set slippage/chains/risk. DeFi ready.
Chat from Discord, WhatsApp, Telegram and Web.
English
Another good opportunity currently on @arc !!
Arc is not an ordinary Web3 project. It is an institutional focused project built by @circle as a Layer 1 blockchain acting as the economic OS for the internet, focused on onchain payments.
The token is confirmed and I think the two best ways to position here are:
1. Build on Arc :
Since the project is primarily built for developers and enterprises / institutions, developers will have a strong edge here.
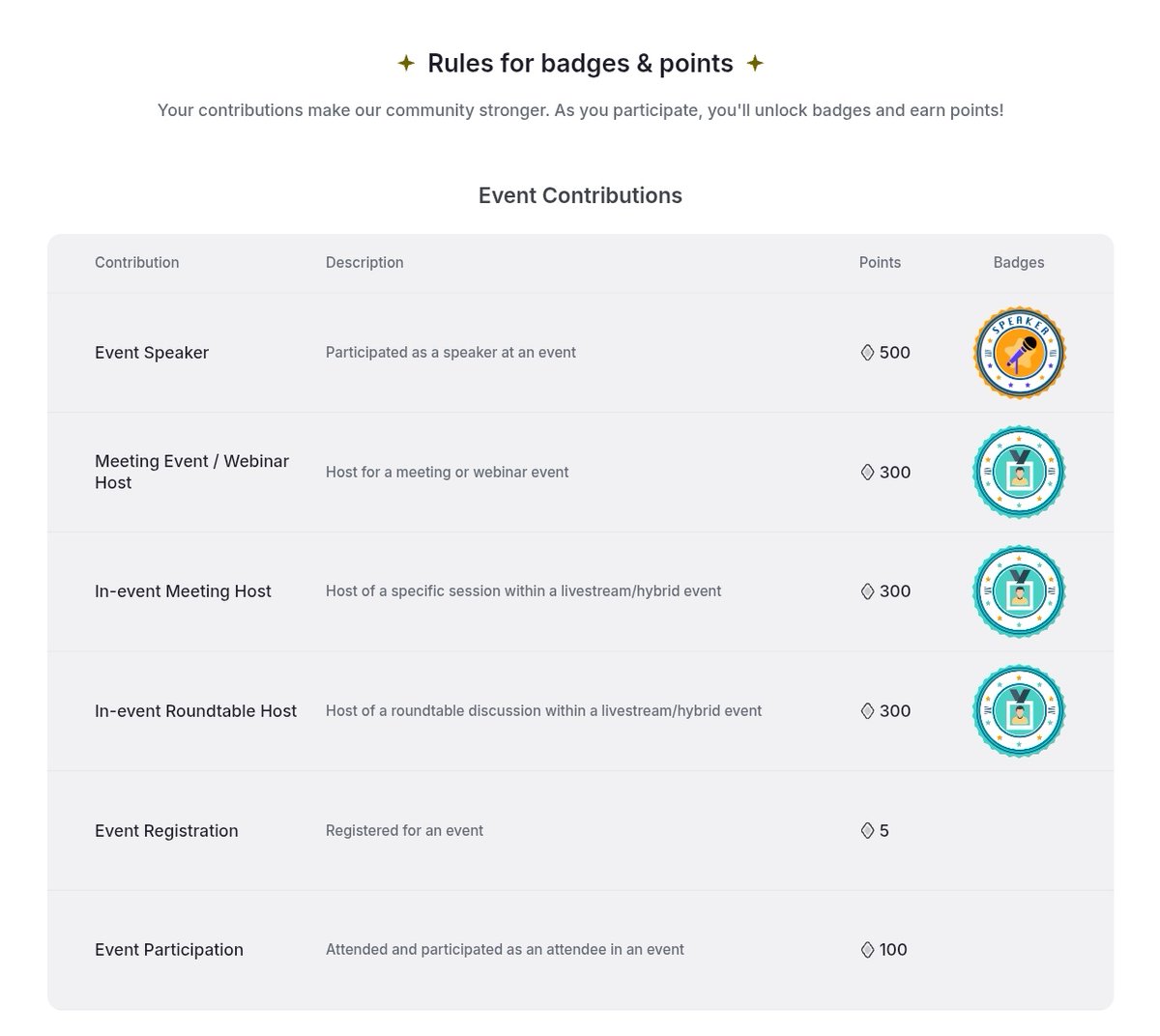
2. Join their community badge & points program : community.arc.network
Steps:
- Click "Join Community" and sign up with email
- Create your account and submit the application
- Wait for the application to be reviewed then start earning points and badges
I don't believe testnet interaction alone will be heavily considered for incentives from the project.

English

The event starts in a few hours don't miss it!
Prizes, fun games and more!!
Will also share some updates about combat solo mode 🦾
Lucid - Internet of AI (IoAI)@LucidChain
Solana Sunday. 1pm EST Lucid x @apecoin x @YakuCorp See you on the @OthersideMeta You have 36 hours left to claim the Yaku Shinigami Avatar in Lucid discord.
English
Ansh 🪁 retweetledi
Solana Sunday. 1pm EST
Lucid x @apecoin x @YakuCorp
See you on the @OthersideMeta
You have 36 hours left to claim the Yaku Shinigami Avatar in Lucid discord.
English
Let me explain why this phase feels different :
In previous bear markets, there were still many good projects from the end of the bull run that felt worth interacting with and because of that, people stayed busy exploring and integrating with those projects. Also, the positive sentiment from the previous bull run kept the community motivated and active.
But now the situation feels different :
Due to the oversaturation of Web3, many bad actors launched low quality projects during the bull run which damaged the overall sentiment and because of this, there are very few meaningful projects that actually feel worth interacting with except for a few.
So the difference is :
Previously, during bear markets, people stayed busy with older projects and the positive sentiment from the bull run kept the ecosystem active.
But now there are hardly any strong old projects and the sentiment has already turned negative even during the bull phase for various reasons.
So this kind of phase has always existed in crypto but the difference is exactly what I explained above.
English
Most AI agents? Just fancy wrappers for what Grok/ChatGPT/Claude already crush.
Lucid fixes the real bottlenecks:
> portable memory
> shared context
> Data ownership
The end-to-end value chain for the agentic economy is only on Lucid.
English
Ansh 🪁 retweetledi
We have been saying this for quite some time.
Until people take this serious we will continue to see this level of ignorance propagated
Remember the 2024 “Mother of All Breaches”
It will be much worse, with more financial implications.
Openclaw = software terrorism
GIF
SPEC@___4o____
Quick OpenClaw update: - 6.4K open issues - 5.5K open PRs - 230 unresolved security vulnerabilities (+200% MoM) All of the grifters/VCs falling for and enabling this type of shit are effectively software terrorists.
English
Most agents track price.
Ours track how information propagates through markets.
That difference is where the edge comes from.
The visualization below is a Shannon entropy field: a model of how uncertainty collapses and spreads as new information enters a market.
Each trade, liquidity shift, or derivatives flow updates a probability distribution.
When information arrives, entropy collapses locally as the market incorporates it. But that update rarely happens everywhere at once.
Different venues, liquidity pools, and derivative layers incorporate signals at different speeds, creating measurable information gradients across the system.
One of the analytical tools in our agents’ stack models this directly:
> Entropy quantifies uncertainty embedded in each probability market
> KL divergence reveals conflicting distributions across venues
> Information gradients show where signals have propagated—and where they haven’t yet
Prediction markets and DeFi make this particularly powerful because price already represents probability.
Mapping how those probability distributions update across venues turns the market into a measurable system: a live field of information flow showing where uncertainty remains—and where probability is likely to adjust next
English
𝐇𝐨𝐰 𝐓𝐞𝐥𝐞𝐨𝐩𝐞𝐫𝐚𝐭𝐨𝐫𝐬 𝐓𝐞𝐚𝐜𝐡 𝐑𝐨𝐛𝐨𝐭𝐬 𝐭𝐨 𝐏𝐫𝐢𝐨𝐫𝐢𝐭𝐢𝐳𝐞 𝐒𝐚𝐟𝐞𝐭𝐲
Inside PrismaX, you quickly realize that completing the task isn’t always the most important goal.
Sometimes the smartest move is not finishing the task at all.
Practical experience:-
During a teleoperation session, a robot was moving a fragile container across a shelf.
Everything looked normal at first.
But as the robot lifted the container, I noticed something subtle:
• The object shifted slightly
• The grip wasn’t perfectly centered
• The shelf edge was closer than expected
Technically, the robot could still try to finish the placement.
But instead of pushing forward, I paused the movement and reset the approach.
The container was re-gripped and placed safely on the second attempt.
This moment matters more than a perfect execution.
PrismaX records:
• Why the action was paused
• What signals indicated risk
• How the safer strategy was chosen
Over time, robots begin to learn something critical:
Safety is not a constraint it’s a decision rule.
Ansh 🪁@ag7oct
𝐓𝐫𝐚𝐧𝐬𝐩𝐚𝐫𝐞𝐧𝐜𝐲: 𝐖𝐡𝐲 𝐒𝐞𝐞𝐢𝐧𝐠 𝐑𝐨𝐛𝐨𝐭 𝐃𝐞𝐜𝐢𝐬𝐢𝐨𝐧𝐬 𝐁𝐮𝐢𝐥𝐝𝐬 𝐑𝐞𝐚𝐥 𝐂𝐨𝐧𝐟𝐢𝐝𝐞𝐧𝐜𝐞 In robotics, one of the biggest barriers to trust isn’t failure. it’s not knowing why a robot did something. Inside PrismaX, transparency is built into the teleoperation experience. As a teleoperator, you don’t just see outcomes you see the decision process: • Confidence levels before actions • Camera views and perception overlays • Suggested paths vs. human overrides • Logs of past corrections and outcomes This visibility changes how you interact with the system. Practical experience You’re supervising a robot placing fragile items into storage bins. The robot pauses and highlights a low-confidence zone near the bin edge. Instead of guessing, you can see: •The perception model is unsure about depth • Lighting glare is affecting detection • The suggested path risks collision You adjust the angle and lighting, then approve the placement. The task succeeds and more importantly, you know why. PrismaX records this interaction, improving future decisions and making them explainable. Transparency enables: • Faster debugging • Better human decisions • Safer deployments • Stronger trust in autonomy From the operator’s perspective, transparency turns robotics from a black box into a collaborative system
English
The Lucid Agent integrates key DeFi protocols, top exchanges, prediction markets, etc.
True value: seamless orchestration.
A single secure agent handles payments, trades, comms, deployments, all on Solana's speed.
Agentic efficiency enabled.

English
@EarnByAbhi Appreciate the transparency and the fair distribution. I also follow you since 2024 and get help from your vedio ,give me also a fair chance
English
🎉 2nd batch of around 100 users distributed from my side.
(Attached the maximum screenshots I could)
Check your DM, and if you didn’t win this time, wait for the next round next week (there will be more batches).
Just make sure to keep engaging with the posts and follow the main rule of the giveaway post.
Request to all winners: you can post a quote tweet as a token of appreciation as I’m doing everything transparently.
Many people share used codes publicly as they can easily say someone used it after posting but I am using the private DM method so that everyone gets a fair chance.
🫡
Abhi.eth@EarnByAbhi
🎉 1st batch of around 100 users distributed from my side. (Attached the maximum screenshots I could) If you won, you should have received a DM. If not, wait for the next batch as codes will be distributed in batches. To all winners: consider it a Holi gift from my side. In return, you can post a tweet as a small token of appreciation. Happy Holi guys, enjoy! 🎨🤝
English
Lucid isn't just another agent or wrapper.
It is the real infra foundation of web4 and intelligence for Autonomy
> portable user-owned memory
> on-chain proofs of contribution/inference, RL routing
> decentralized GPU compute
> composable agents with 500+ integrations.

English
One subscription. Every model. Every tool.
ElevenLabs voice, Veo video, frontier LLMs, image generation, trading suites, agents — all included.
Annual Plus or Dynamic → $LUCID Rebate Airdrop eligibility.
Simplify your stack. 1 week left to get your Diamond role.

English