Sabitlenmiş Tweet

Maybe the real alpha was the friends we made along the way 🙌🐳
pranay@pranaymohan
@odyslam_ maybe the real exploit was the friends we made along the way
English
Daniel Ong
1.6K posts
@dan_menlo
Founder 🖖@menloresearch. Building @asimovinc, @jandotai
@odyslam_ maybe the real exploit was the friends we made along the way

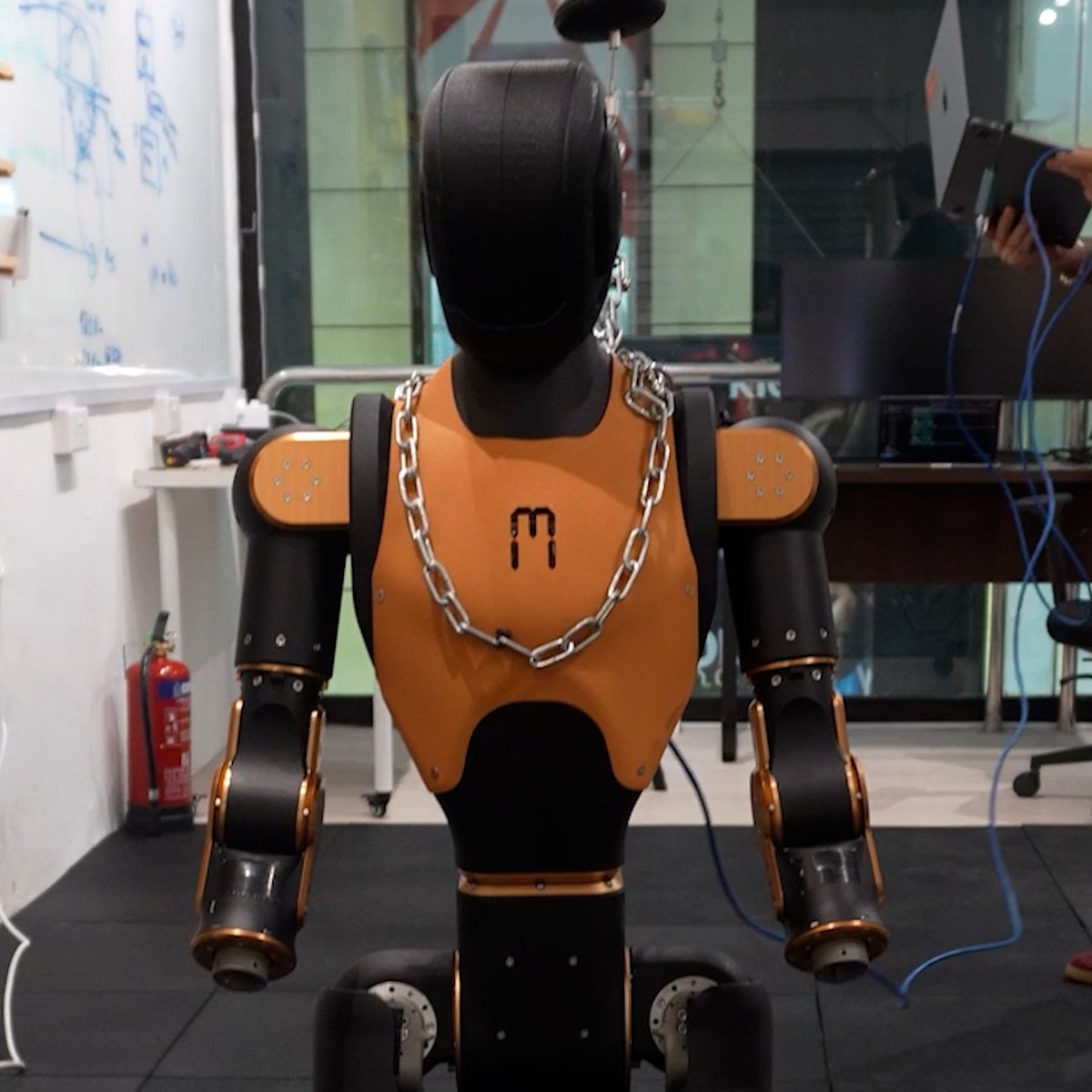
You can teleoperate Asimov. We're testing the setup. This is the first look.




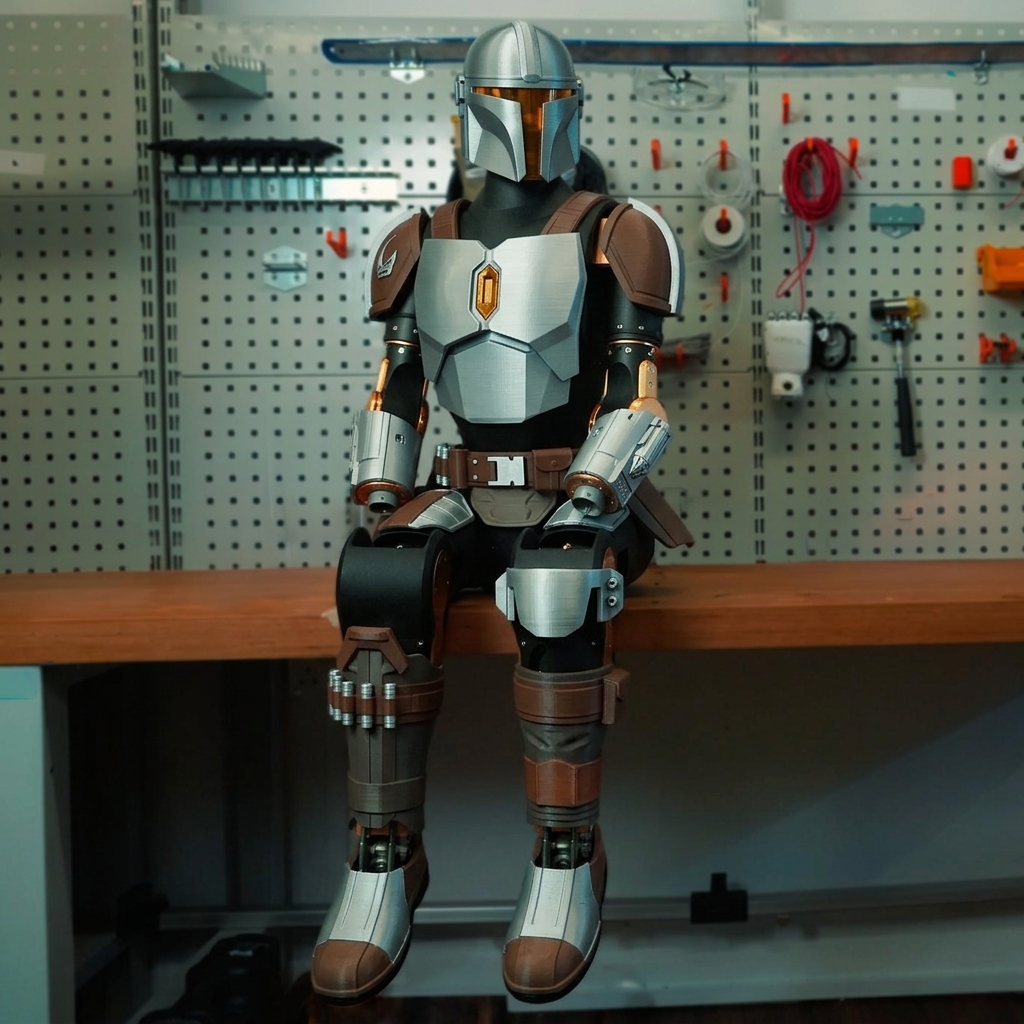
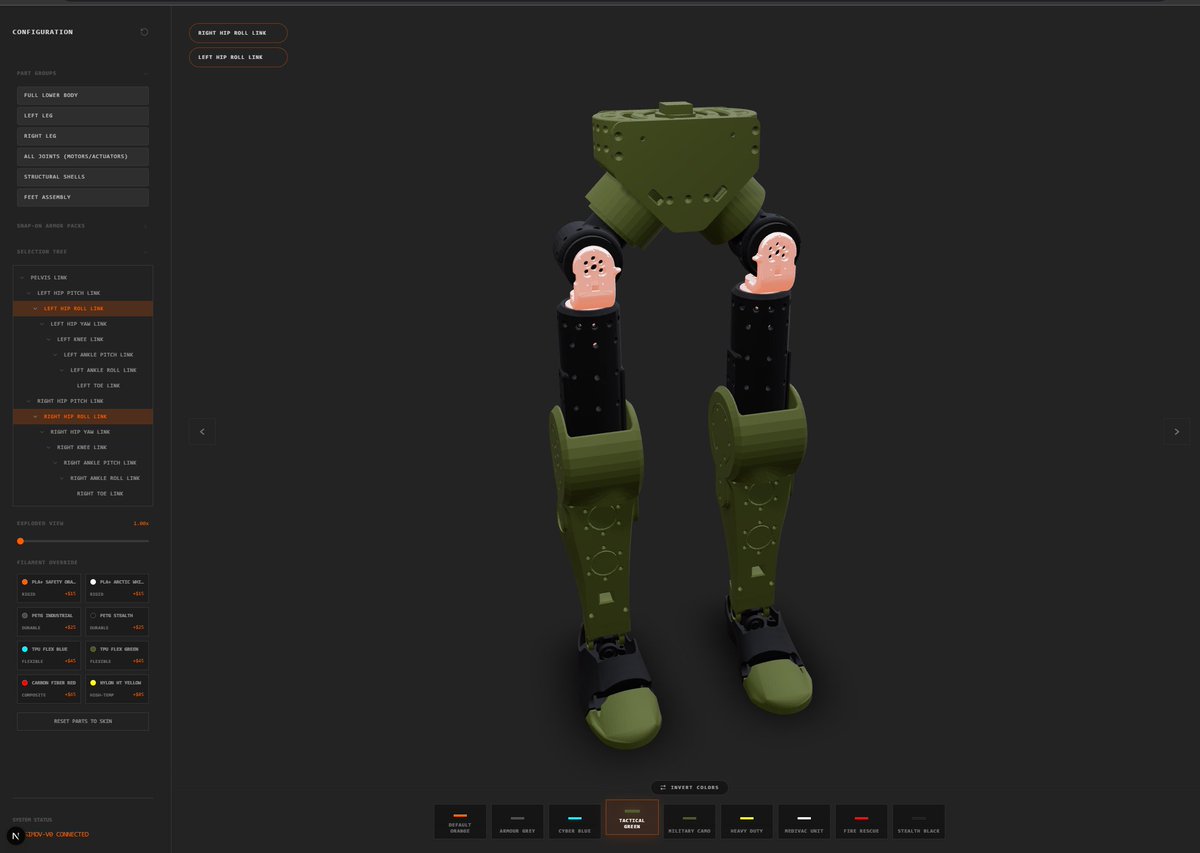
The full-body build for Asimov is coming together.

@eckartal lol we spent a lot more than 100k to day. It’s in the millions. But that’s ok. There’s lots done well here. And lots we’ve done differently. Hats off to the Asimov team for making great stuff and open sourcing it
Introducing OpenCrane, an open-source crane for humanoid robots. 200 cm tall, 180 cm span, built from 6063-T5 aluminium extrusions. It's easy to mount anything onto the frame without drilling. Repo: github.com/asimovinc/open…
This clip is more impressive than 99% of robots doing MMA. Unitree is increasingly being used in real-world environments, its use in hospitals being the most obvious application. I can easily imagine that in just a few years, numerous robots will already be working as support staff.