Sabitlenmiş Tweet

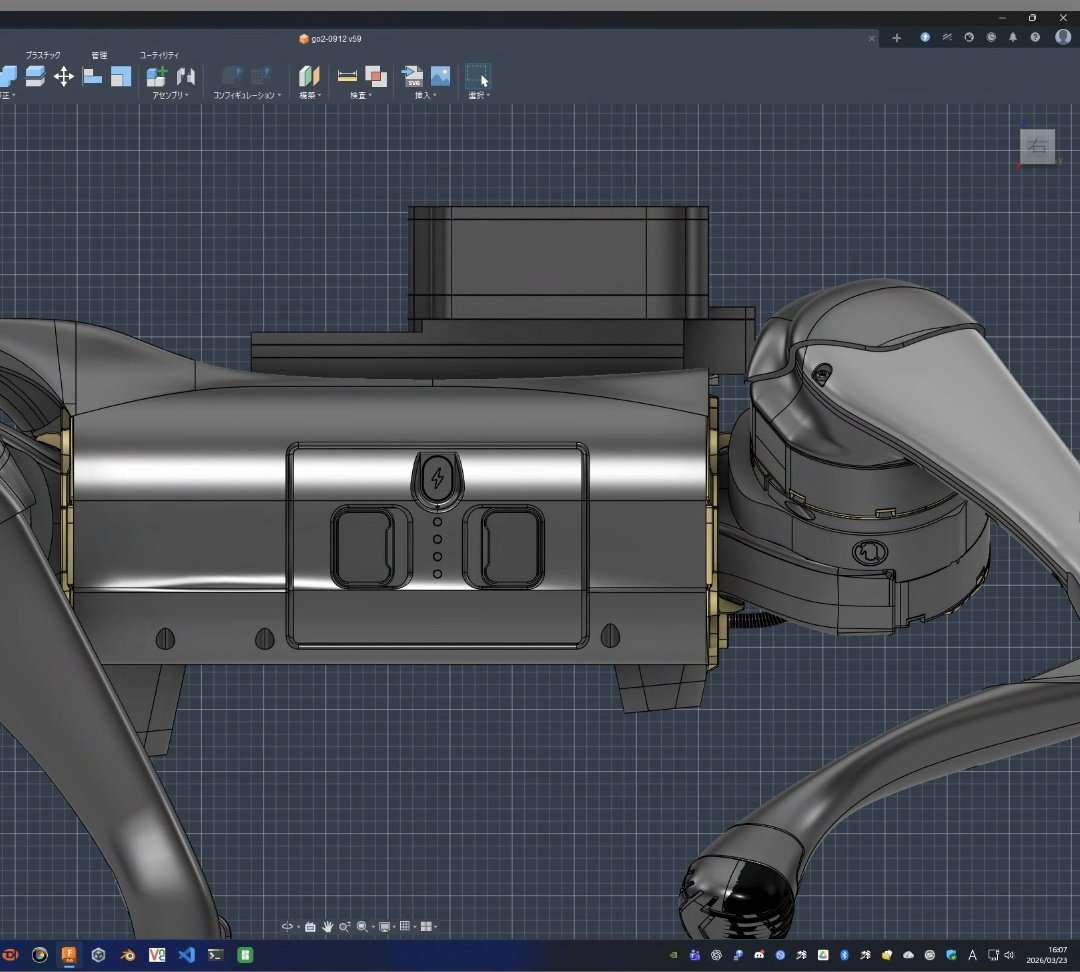
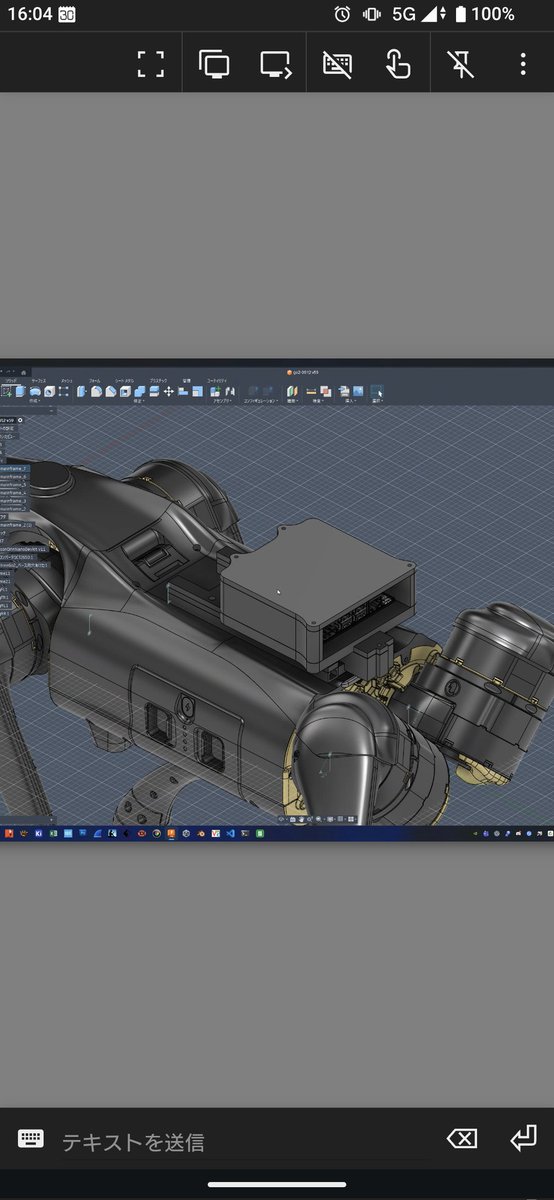
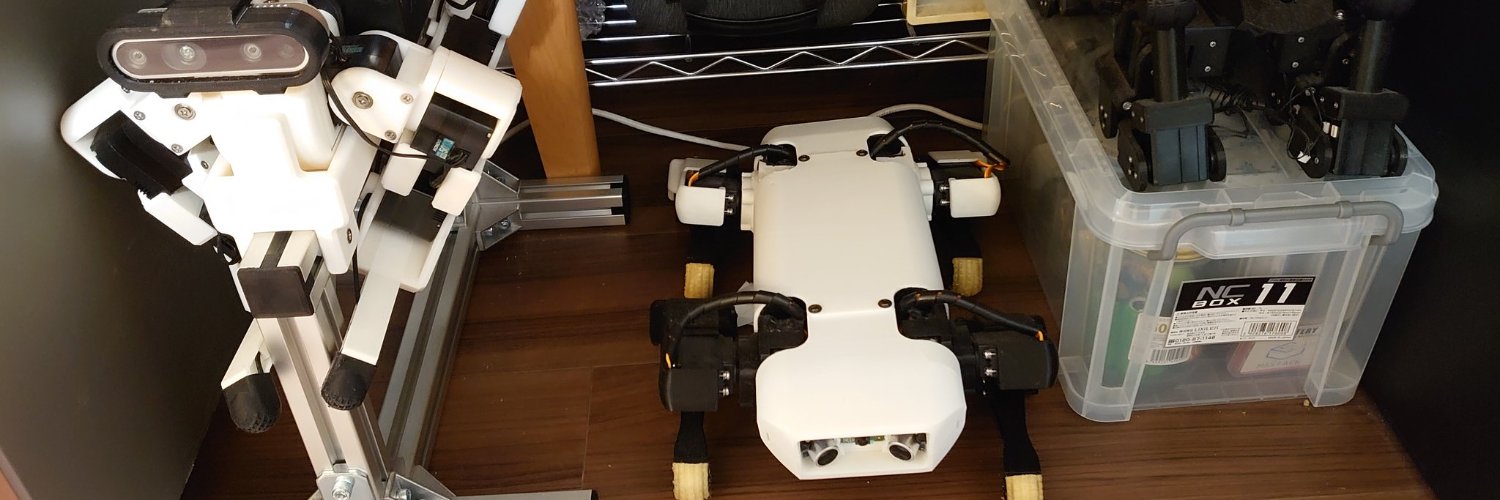
昨年からずーっとやってる、自作の四脚ロボ!
ようやく足踏みさせてポテンシャル確認! 6.5kg のこの機体、ここから改めて色々と学んでいきたいと思います。
でべ@devemin
チビつよBLDC ギヤモータ届きましたわぁーーー! Steadywin GIM4310-10 自分の四脚ロボ作りの変遷のなかで、ひとつの一大事!!
日本語
でべ
55.2K posts
@devemin
4脚ロボ作りを楽しみ中 家庭用ロボットをラズパイやArduinoで作りたい気持ちで遊んでいます。 ゲームはMGO4早よ頼みます! https://t.co/oq44L8Q728
チビつよBLDC ギヤモータ届きましたわぁーーー! Steadywin GIM4310-10 自分の四脚ロボ作りの変遷のなかで、ひとつの一大事!!






今までの人生で多分数千回以上はかわ「ず」じゃなくてかわ「づ」ですと訂正しているが最近は面倒で記録が残るもの以外は放置している。だが英語で書くとKAWAZUなので何も言えない。