
DRONEFORGE
409 posts

DRONEFORGE
@droneforge
Building the intelligence layer for everyday drones. Nimbus adds object tracking, repeatable routes, and programmable autonomy. Starting at $159!
El Segundo, CA Katılım Kasım 2024
0 Takip Edilen7.4K Takipçiler




interested in deploying RL policies on drones? we are the quickest path to deployment!
thedroneforge.com
English
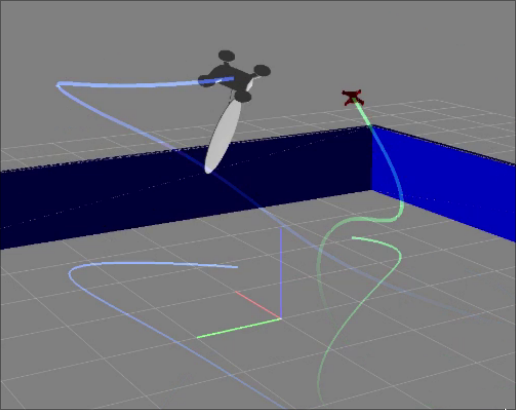
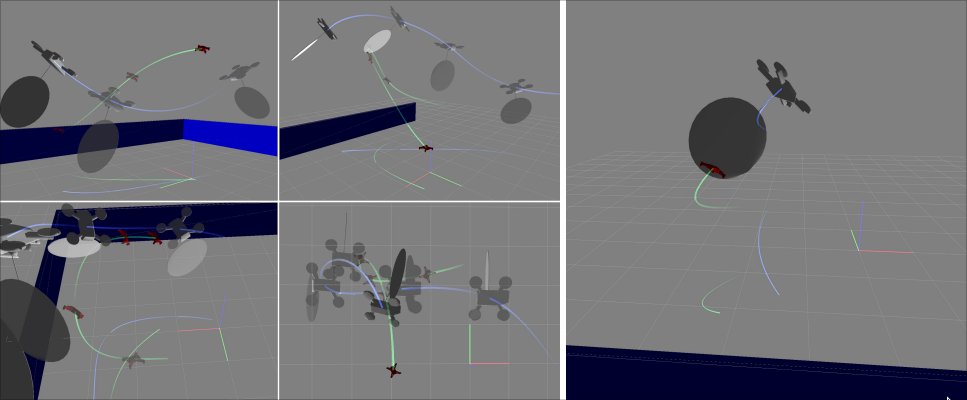
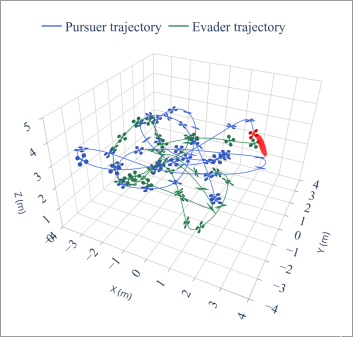
🚨 Adversarial RL for Drone Interceptors:
Competitive RL is being used to train drone interceptors against agile evasive drones
But instead of training only the interceptor (pursuer), this paper trains both sides.
1. The interceptor learns to catch
2. The evader learns to escape
Making autonomy adversarial pushes both policies to its limits. Both agents are trained inside a high-fidelity JAX quadrotor simulator running massive parallel rollouts
Results showed a successful transfer zero-shot to a real indoor flight arena, and caught the simulated evader 7 times in 28 seconds.
Paper: arxiv.org/pdf/2603.16279

English
@aussetg no ITAR stuff, but the frequencies on our TX module could land you in trouble with the communications department of your country
English

@droneforge No ITAR shenanigans though right ? If not I can just find a way to get it.
If yes, I would *definitely* not try to find a way and have never found a way to get ITAR items 😶🌫️
English
@droneforge When you say "Sensors required MTF-02 rangefinder", how *required* are we talking ? Can I yolo without it ?
English
Droneforge is an ode to the goodness of robotics
To the celebration of accessibility and the powerful intelligence that will change the world for the better
English
Building toward more useful, programmable drones at Droneforge -- check us out!
thedroneforge.com
English
🚨Awesome UAV Datasets
(specifically curated for training VLA's)
> Synthetic UAV Flight Trajectories — Hugging Face dataset with 5,000+ synthetic UAV trajectories over ~20 hours of flight time
huggingface.co/datasets/riotu…
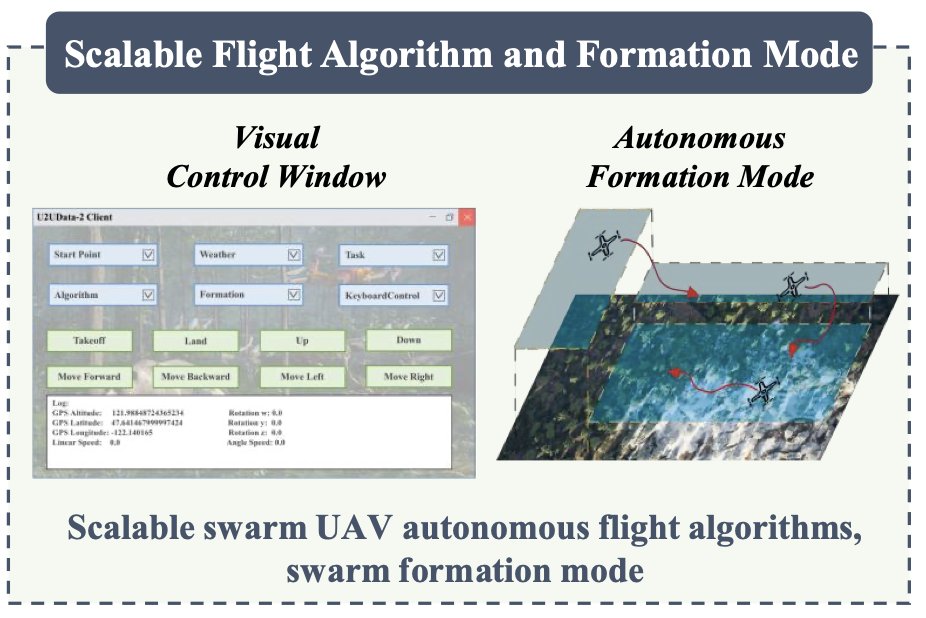
> U2UData+ / U2UData-2 — Large-scale swarm UAV autonomous flight dataset: 15 UAVs, 12 scenes, 720 traces, 120 hours, 600 seconds per trajectory, with RGB, depth/LiDAR, and environmental signals
arxiv.org/pdf/2509.00055
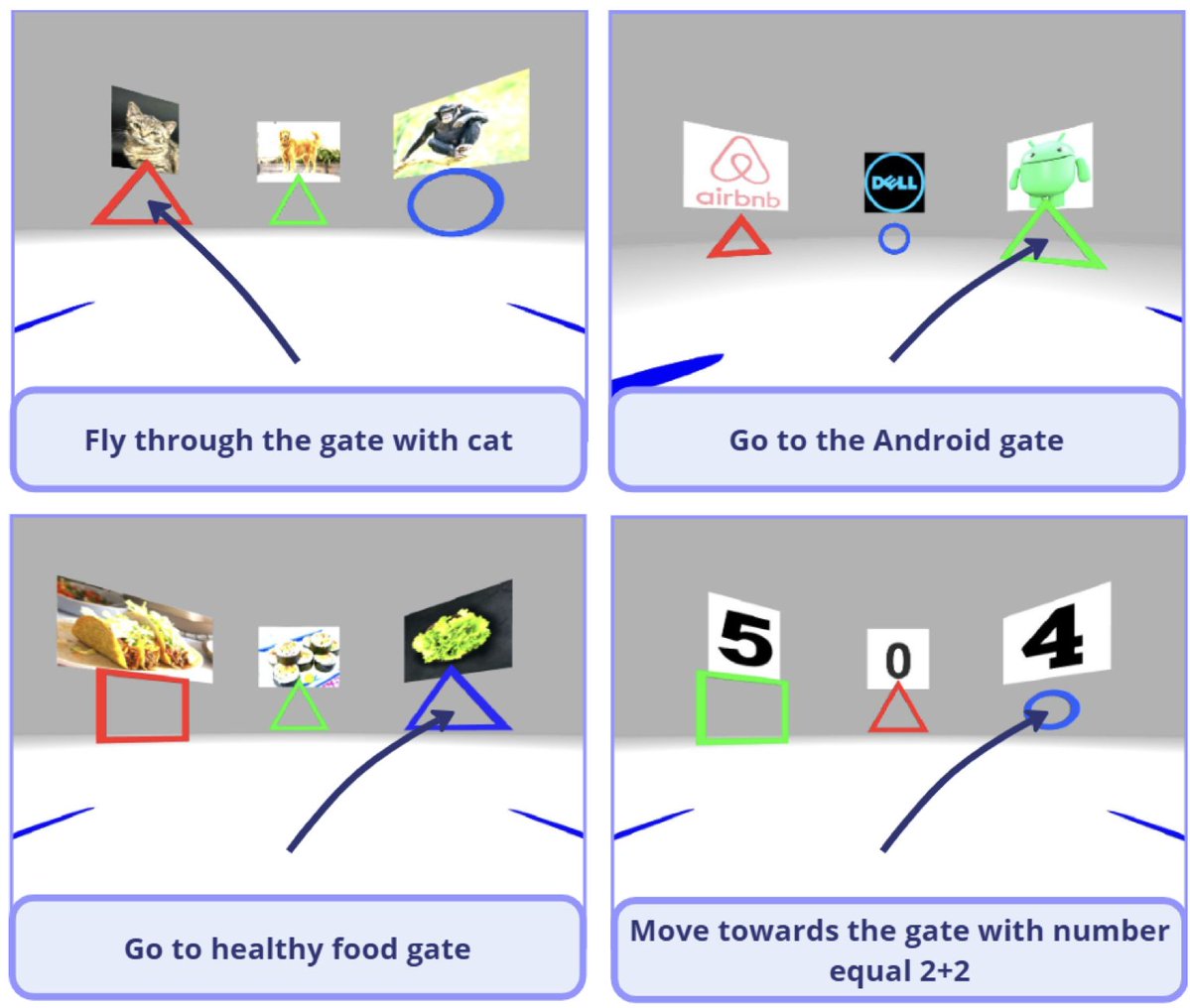
> CognitiveDrone Dataset — 8,062 simulated UAV flight trajectories for VLA-style drone control, split across human recognition, symbol understanding, and reasoning tasks
arxiv.org/pdf/2503.01378
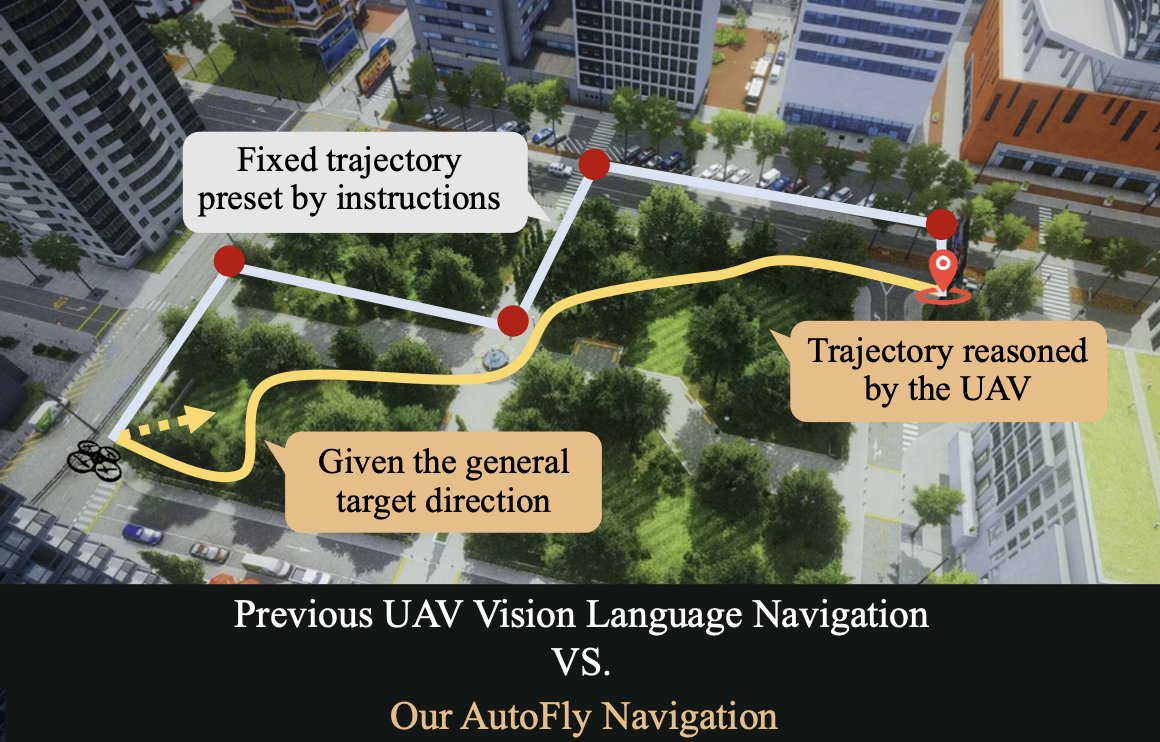
> AutoFly Dataset — VLA-style UAV autonomous navigation dataset with 13K+ episodes and 2.5M image-language-action triplets, built from expert demonstrations and simulated trajectories, plus 1K real-world flight episodes for sim-to-real validation
arxiv.org/pdf/2602.09657…
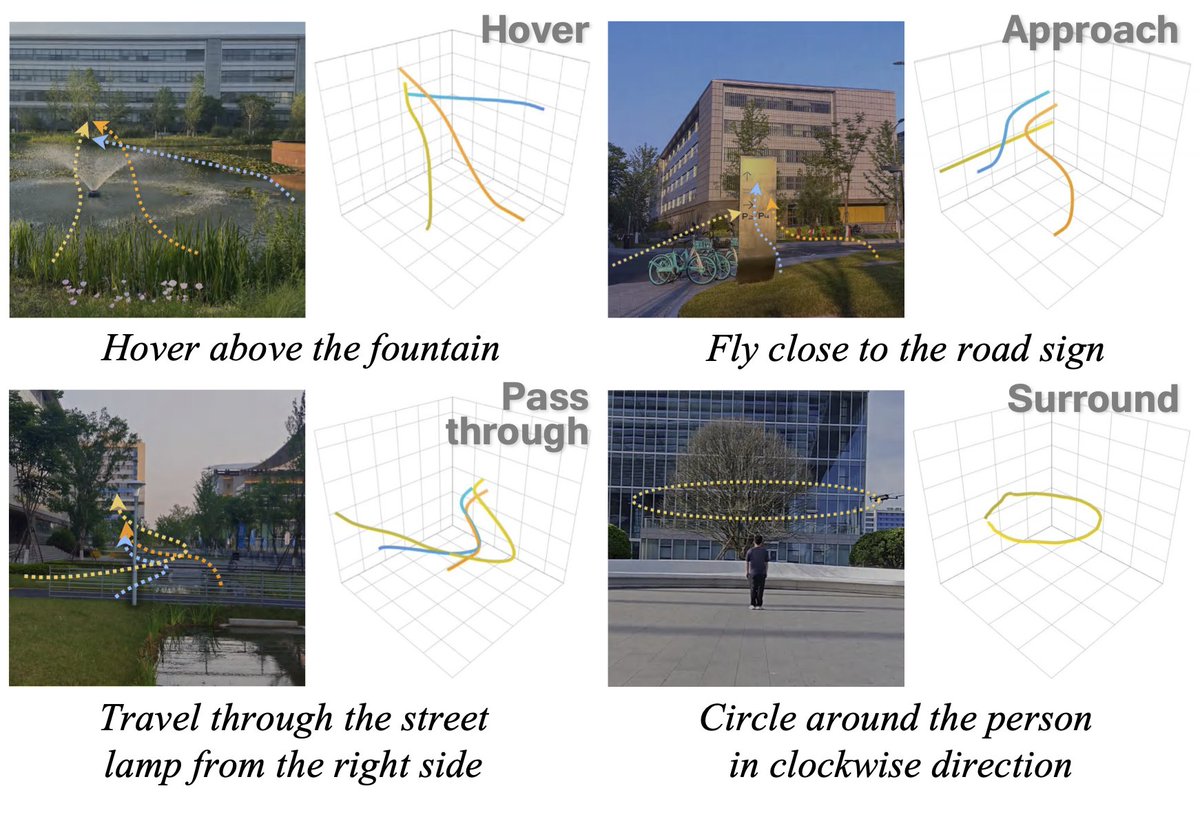
> UAV-Flow / UAV-Flow-Sim — Real-world language-conditioned UAV imitation-learning benchmark with 30,692 real UAV flight trajectories and 10,109 simulated trajectories, where each sample includes language instruction, egocentric visual observation, and 6-DoF UAV state/action trajectories
arxiv.org/pdf/2505.15725…
English
@aussetg you can soon :)!
we are open sourcing our python library next week to create your own state estimation pipelines! would love to see what you can cook up
English
@droneforge Sad :(
I wonder what would happen if I were to feed estimated data instead 😏
English
Drone of the Day
"Heewing T1 Ranger VTOL"
by daedalusfpv
Build details in the thread 👇


English
Building toward more useful, programmable drones at Droneforge -- check us out!
thedroneforge.com
English
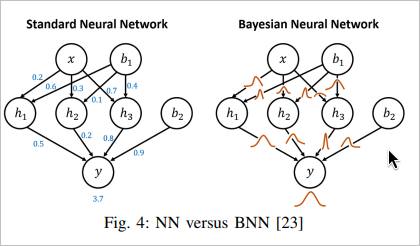
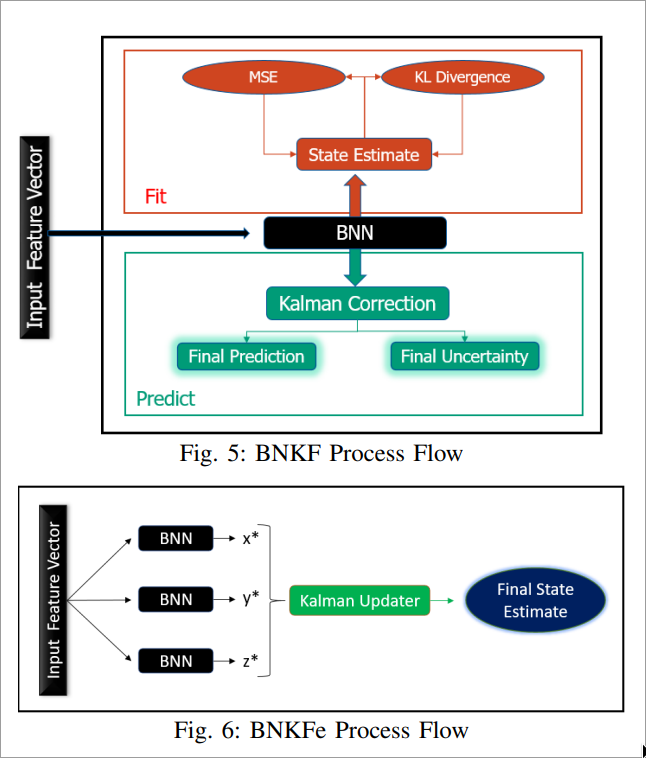
🚨 New Drone Research:
Neural Aided Kalman Filtering makes UAV tracking more robust when sensor data gets noisy or sparse.
Instead of hand modeling the drone’s motion (which honestly is a huge pain), the paper trains a Bayesian neural net on 5,000 synthetic UAV trajectories with simulated radar measurements to estimate 3D position and uncertainty.
Under high sensor noise, BNKF held ~8.6m average position error vs the ~35m for EKF and ~67m for UKF in the synthetic UAV tests.
Promising simulated results, with good direction, but very hard realistically to deploy into production.
Paper: arxiv.org/pdf/2604.28107…
English




@droneforge Is this related to, or built off of, the AirSim unreal engine plugin?
English
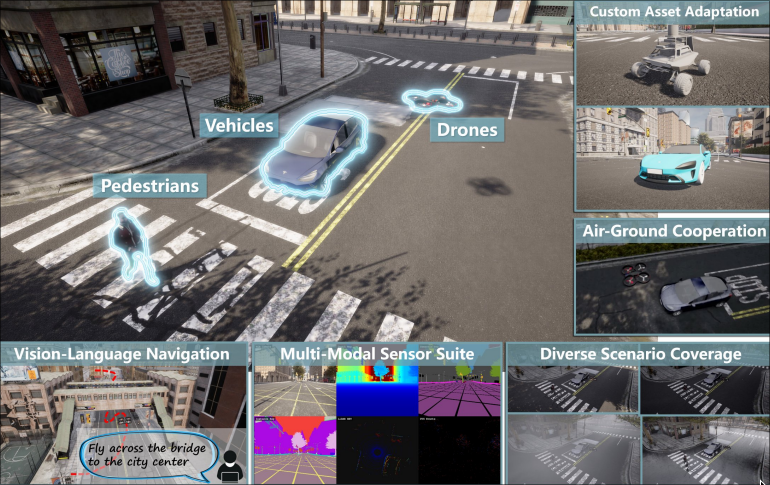
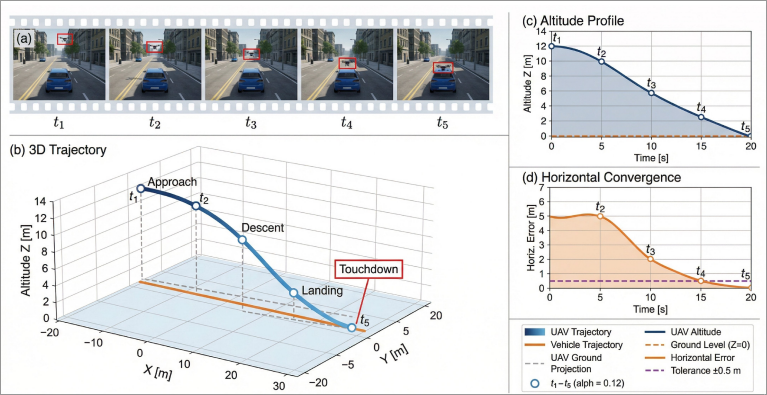
🚨 New Drone Sim:
4.22.26 CARLA-Air: Unified Simulation for Aerial-Ground Embodied Intelligence
Researchers built a single simulator where drones and ground agents coexist with real physics -- introducing a level of realism the UAV industry has needed for some time.
CARLA-Air unifies CARLA (the standard urban driving simulator) and AirSim (multirotor flight) into one Unreal Engine stack, so drones can interact with traffic, pedestrians, and dense environments without hacks or crazy domain splits.
Great for UAV autonomy validation and R&D.
Check out the paper: arxiv.org/pdf/2603.28032
English