Chris Liu
159 posts

Chris Liu
@drxcliu
Physical AI / Multi-modal / Fitness. Building @deepreach_AI
California, USA Katılım Şubat 2024
308 Takip Edilen58 Takipçiler


$499 DIY你自己的Optimus机器人
Asimov即将推出1.2 米高的人形机器人 DIY 套件:结构件、执行器、电机、传感器全打包。35kg,27 个自由度,单臂能举 18kg。全开源,随便拆,随便改。
定位: 人形机器人界的树莓派/Arduino开源平台。
如果把OpenClaw丢进这套硬件里当大脑,让小龙虾🦞接管这套硬件,用高速LLM输出结果:
方式一:Skills 直接驱动硬件
写一个 Skill,让 OpenClaw 通过串口或 ROS2 发指令控制关节。当我们说"把桌上那个杯子拿过来",OpenClaw 理解意图,转换成关节角度序列,执行。这和现在让龙虾控制浏览器点击按钮,底层逻辑完全一样。
方式二:视觉感知 + 决策
OpenClaw 现在已经能截图分析界面。接上摄像头,就能"看"物理环境。感知 -> 推理 -> 执行,这个 Agent 闭环在数字世界跑通了,搬到物理世界只是换了执行层。
方式三:多 Agent 分工
一只龙虾负责感知和环境理解,一只负责运动规划,一只负责和你对话接收任务。多 Agent 架构天然适配这套分工。
方式四:Memory + 持续学习
每次任务结束,写回 MEMORY.md。机器人记得上次搬箱子的路径、记得家哪个门需要用力推、记得主人喜欢咖啡放在哪里。这是 OpenClaw 记忆系统的物理世界延伸。
类似Openclaw控制chrome浏览器:
以前:控制浏览器 = 模拟点击。
现在:控制关节 = 物理执行。
当大模型有了手脚,它就不再是聊天机器人,而是真正的数字劳动力。
Asimov@asimovinc
Asimov v0's assembly guide is coming next week. We're also open-sourcing the full body design for Asimov v1, including everything from the actuator list to simulation assets for training. Pre-order your DIY robot kit: asimov.inc/diy-kit
中文
@lukas_m_ziegler @enactic_ai Open source is not an issue - the problem is the hardware setup cost
English

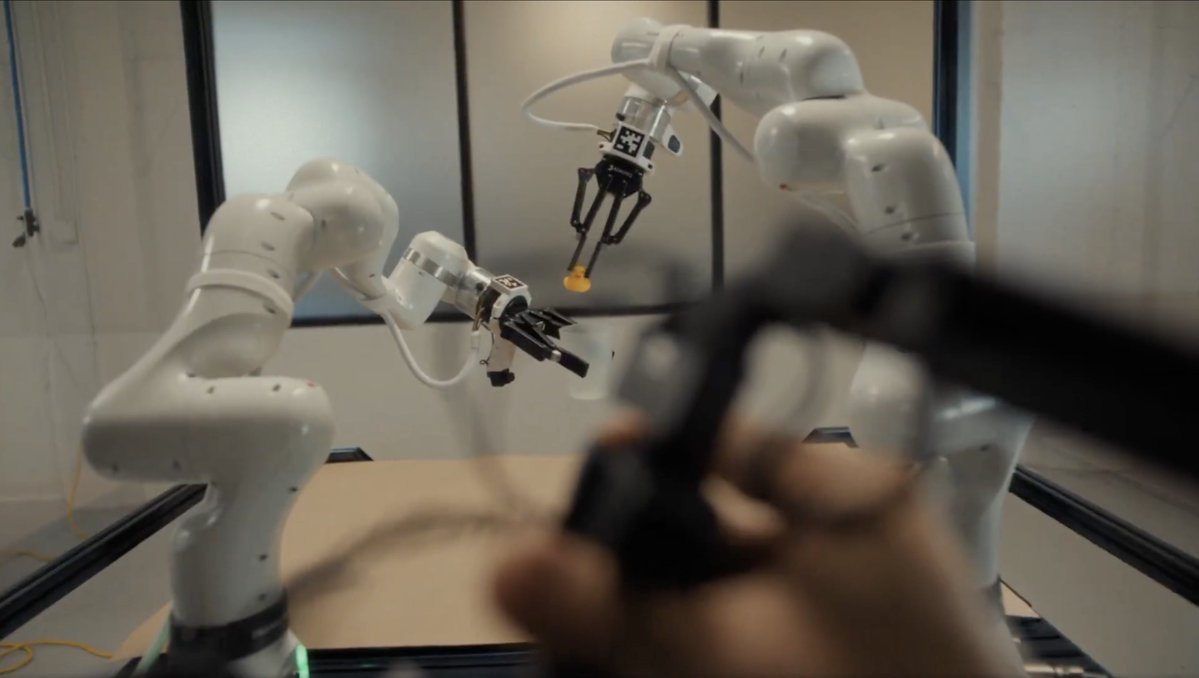
How do we make robot policy evaluation reproducible across labs? 📊
Different labs use different lighting, camera angles, task setups, backgrounds, and hardware tweaks. That makes side-by-side policy comparison almost impossible.
OpenArm 02 from @enactic_ai is an attempt to fix that.
It’s a fully open-source dual-arm platform designed specifically for reproducible evaluation.
The idea is simple: standardize the physical setup so results can actually be compared across institutions.
On top of that, it introduces AutoEval, a 24/7 real-world evaluation loop with minimal human intervention, building on prior work in automated benchmarking.
Instead of manually running trials, policies can be evaluated continuously under consistent conditions.
It’s the shift from isolated demo results to shared, comparable benchmarks.
If robotics wants faster collective progress, reproducible evaluation infrastructure like this is a necessary step.
~~
♻️ Join the weekly robotics newsletter, and never miss any news → ziegler.substack.com
English


*Very* happy to share lerobot is going to ICLR 2026 🇧🇷
See you in Brazil!
English

CoRL is coming to Austin, TX this November!
As General Chair, I'm thrilled to welcome the robot learning community. 2026 feels like a pivotal year as AI-powered robotic systems begin deploying at scale for real-world tasks. This year, I hope CoRL will be the forum that connects cutting-edge research with industrial practice.
Please submit your best work and join us in Austin. DM me what you'd love to see CoRL do better!
corl.org
Conference on Robot Learning@corl_conf
Calling all researchers! 🤖The CoRL 2026 website is officially live at corl.org with key dates for your submissions: 🗓 May 25: Abstract Submission 🗓 May 28: Full Paper Submission 🗓 Nov 9-12: Conference in Austin, TX Send us your coolest work! #RobotLearning
English


For those unaware, SpaceX has already shifted focus to building a self-growing city on the Moon, as we can potentially achieve that in less than 10 years, whereas Mars would take 20+ years.
The mission of SpaceX remains the same: extend consciousness and life as we know it to the stars.
It is only possible to travel to Mars when the planets align every 26 months (six month trip time), whereas we can launch to the Moon every 10 days (2 day trip time). This means we can iterate much faster to complete a Moon city than a Mars city.
That said, SpaceX will also strive to build a Mars city and begin doing so in about 5 to 7 years, but the overriding priority is securing the future of civilization and the Moon is faster.
English