Philipp Foehn retweetledi
Philipp Foehn
30 posts

Philipp Foehn
@foehnph
Based in Zurich, I'm a PhD in robotics, a programmer that does camera-based navigation for drones. I love hiking, traveling and music!
Katılım Haziran 2020
69 Takip Edilen125 Takipçiler



We are excited to release the code (github.com/uzh-rpg/rpg_ti…) of our latest paper in Science Robotics on "time-optimal quadrotor trajectories" that are faster than human #FPV #droneracing pilots!
Paper:rpg.ifi.uzh.ch/docs/ScienceRo…
Full video: youtu.be/ZPI8U1uSJUs
YouTube
English
Philipp Foehn retweetledi

Together with #HILTI, I am co-organizing the #IROS2021 HILTI #SLAM Challenge! Win up to $10,000 prize money and a keynote IROS workshop invitation! Instructions: hilti-challenge.com
w/ @MichaelHelmber1
English
Philipp Foehn retweetledi

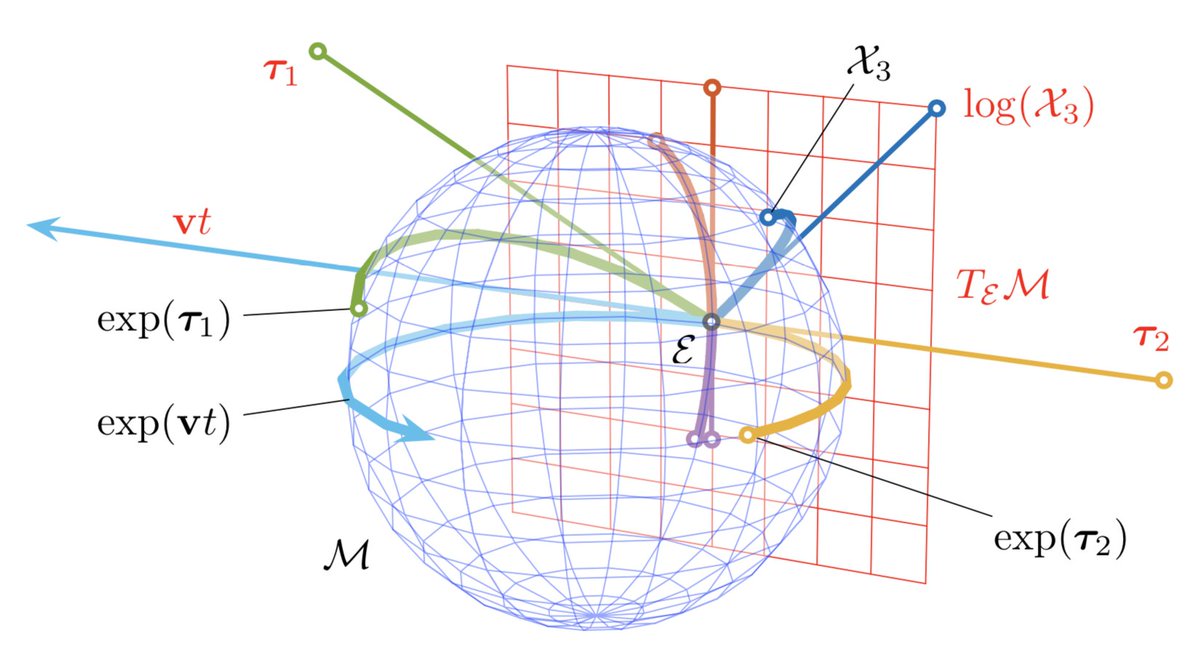
This summer I've been working to finally understand Lie Theory, the basis for proper estimation on over-parameterised manifolds like SE(3). There are some great tutorials for the roboticist out there; I especially like Micro Lie Theory by Solà et al. arxiv.org/abs/1812.01537
English
Philipp Foehn retweetledi
We are excited to announce our latest paper in Science Robotics on agile flight allowing us to generate "time-optimal quadrotor trajectories" that are faster than human #FPV #droneracing pilots! Paper: rpg.ifi.uzh.ch/docs/ScienceRo… Full video: youtu.be/ZPI8U1uSJUs
Kudos @foehnph
YouTube
English
Philipp Foehn retweetledi
We are excited to announce our new, indoor, drone-testing arena! Equipped with 36 @Vicon cameras and with 30x30x8m of flight space, we can deploy advanced perception, learning, control algorithms to push vision-based agile drones to speeds over 60 km/h and accelerations over 5g!
English
Philipp Foehn retweetledi

Philipp Foehn retweetledi
Check out our new paper on Data-Driven MPC for Quadrotors to counteract aerodynamic effects! Up to 70% reduction in trajectory tracking error at speeds up to 14m/s and accelerations beyond 4g!
Paper, code, video: github.com/uzh-rpg/data_d…
@kaufmann_elia @foehnph
@UZHspacehub
English
Philipp Foehn retweetledi

How to keep drones flying when a motor fails?
Researchers at the @UZH_en and @TUDelftDRI show how onboard cameras can be used to keep damaged quadcopters in the air and flying stably – even without GPS. @davsca1
bit.ly/35Def6F
English
Philipp Foehn retweetledi

Time and attention are precious, and we should treat each others’ time and attention with respect. Here is a proposal for some 21st-century rules that should help us do that with modern communication methods: titus-c.ch/2020/12/respec… Thanks Carmen and @foehnph for reviewing!

English
Robotics has a need for combining publications and code!
Papers with Code@paperswithcode
🎉 Papers with Code is expanding to more sciences! Today we launch new sites for physics, maths, CS, statistics and astronomy. You can use these sites to sync your code to show on arXiv. Explore our portal here: portal.paperswithcode.com
English
Philipp Foehn retweetledi

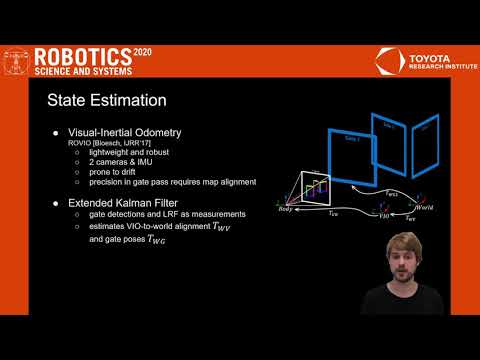
Best Systems Paper Award in Memory of Seth Teller was given to P. Foehn, D. Brescianini, E. Kaufmann, T. Cieslewski, M. Gehrig, M. Muglikar, D. Scaramuzza for “AlphaPilot: Autonomous Drone Racing” - Congratulations!
roboticsconference.org/program/papers…

English
Philipp Foehn retweetledi
Our #RSS2020 paper "AlphaPilot Autonomous Drone Racing" won the Best Systems Paper Award! Congrats to my team P. Foehn, D. Brescianini, @kaufmann_elia, @MathiasGehrig, @tcies, @ManasiMuglikar
Paper: rpg.ifi.uzh.ch/docs/RSS20_Foe…
Video : youtu.be/k6vGEj1ZZWc
@UZH_en @uzh_president
YouTube

English
Philipp Foehn retweetledi
Philipp Foehn retweetledi
Essential #RSS2020 info📢
🗣️Keynote, Early Career talks, Inclusion, and Test of time talk will be made Public! (links will follow)
🔎This was the first year that RSS released the reviews for each accepted paper (when consent was given)
📝All accepted paper are available online
GIF
English
Philipp Foehn retweetledi

We keep talking about incremental development; we don't talk enough about decremental development.
English
Philipp Foehn retweetledi
#RSS2020 has a set of 25 amazing workshops this year, which will take place on July 12 & 13. Registration in the Conference gives you the flexibility to join all workshops. Registration fees are US$ 20 for students and US$ 50 for non-students. Come join us!
English