
Morvyn
477 posts

Morvyn
@itismorvyn
This is a place to document my web3 journey | Contributor @AxisRobotics @dac_chain
Earth Katılım Şubat 2022
125 Takip Edilen100 Takipçiler
Morvyn retweetledi

plan this weekend:
touch grass 🍃 & grow my Badge stack on Inception.
English

Did you know that Axis just reframed cross-sim replay as a denoising problem? Only Real Trajectory counts
#AxisRobotics
Axis Robotics@axisrobotics
Axis Tech Update: From Action Replay to State Replay We've upgraded our backend replay mechanism from action replay to state replay. This can be summarized in 3 steps: - Record state (retain full info) - Compress representation (reduce cost) - Physics consistency validation (remove anomalies) Here is the research behind it: I. Action Replay Fails in Long Tasks Our goal was to enable zero-barrier web teleoperation of robots, seamlessly migrating data to servers for training and cross-sim replay. The pipeline spans multiple environments: User Browser (WASM) ➡️ Server Sim (Python MuJoCo) ➡️ Target Sim. Initially, we used Action Replay (recording commands and replaying them), but success rates dropped drastically as tasks got longer. II. The Root Cause: Underlying Differences in Simulators This error stems from the underlying heterogeneity across simulation environments. Different simulators have micro-differences in numerical precision, physics solver logic, time steps, and collision handling. In dynamical systems, these micro-errors are continuously amplified during time integration. State evolution is recursive: [Current State + Current Action ➡️ Next State]. A tiny deviation early on shifts the contact point, altering collision feedback. Eventually, the trajectory branches off irreversibly. Meaning: The same actions don't yield the same results across different sims. Relying solely on action sequences cannot guarantee reproducible physical trajectories. III. State Replay and New Challenges We shifted our paradigm to State Replay. Instead of recording "what actions were executed," we record "what physical states the system actually experienced." By recording full environment snapshots and loading them during replay, we bypass re-calculating the causal chain. This brought 2 new challenges: 1️⃣ Data Volume: We redesigned data structures to compress 1s of trajectory to ≈ 1KB. 2️⃣ Cheating Risks: Users could fake intermediate trajectories (see our recent anti-bot update). To fix this, we introduced Physical Consistency Validation. The physics engine acts as a referee, enforcing strict constraints: Extract [State + Action] ➡️ Run 1 server sim step ➡️ Get predicted state ➡️ Compare with recorded state. If the error exceeds the threshold, it's rejected. IV. A Higher-Level Perspective: A Denoising Problem From a higher perspective, cross-sim replay actually deals with noisy trajectory data (Real Trajectory + Cross-Sim Error). Our goal is to restore a physically consistent trajectory despite these inherent errors. We accept the inevitable biases between different simulators. Through state recording, compressed representation, and step-by-step physics validation, Axis guarantees trustworthy results. 🔵 To visualize the impact of this upgrade, check out the performance breakdown below. The table compares the success rates of Action Replay vs. State Replay across various tasks.
English
English

English
ranked #1 on the leaderboard with 0:07.
the secret? the robot accidentally kicked the cup right next to the plate.
technically correct. i'll take it 🏆 @axisrobotics
📸 @Stevennn77_
English

@Rafiadehanafi @axisrobotics 2 days felt like forever 😭 glad it's back
English




@0xRahvanaa @axisrobotics @Stevennn77_ lag is brutal 😭 somehow mine didn't lag at all today, first time that's ever happened
English

Indonesia
Akhirnya muncul lagi task Axis
meskipun lag dan sempet ada bug (dadu merrah gweh mana bjirr)
Waktunya menjadi mesin lagiii
Indonesia

English
gAxis!🔥
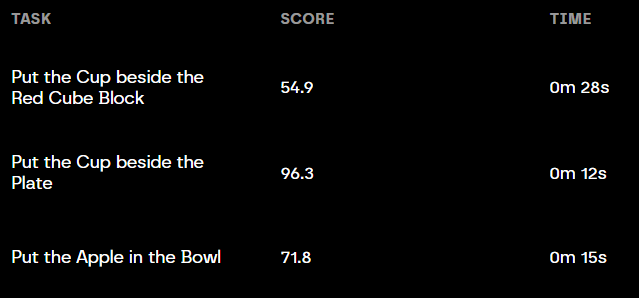
Axis Tasks is finally back!
After waiting 2 days for maintenance, 3 tasks finally popped up, and I cleared them all in under 30 seconds.
Happy sunday!☀️
Have a great day! 😎

English
@Rafiadehanafi @axisrobotics @Stevennn77_ lag is the real final boss 😭 mine somehow worked in my favor.
English
Indonesia
@itismorvyn @axisrobotics I think your robot is a soccer player, haha 🤣
English
English
English
@itismorvyn @axisrobotics Finally no need to wait again 😂
English
2 days of nothing.
then 3 tasks drop at once.
back to work 🤝 @axisrobotics
English
@muuuraonx @axisrobotics Yeah mate, I'm so tired of waiting in uncertainty 😭
English

@fairyrae_ wkwk bener, Sehari tidak ada task aja gelisahnya minta ampun
Indonesia

Akhirnya setelah nunggu-nunggu… TASK IS BACK 🔥
Ternyata mulai hampa kl sehari aja gak ada task 🥲
#AxisRobotics #TaskHunting

Indonesia