
0x_bkt
425 posts
0x_bkt retweetledi
$SHOW quietly building after the first move.
Strong impulse - now holding, No panic dump, Just steady consolidation.
This is where early entries are made.
Once this range breaks, it won’t stay at 300K for long.
First leg already showed strength.
Next one comes faster.
Most people will notice after it’s gone.
$SHOW → early phase 🚀

100xDarren@100xDarren
Looks like $Show @SHOW_ROBOTICS is cooking something cool Another Virtuals robotics project that I'll be keeping an eye on One to watch!
English
0x_bkt retweetledi

0x_bkt retweetledi

Added a sim page to the @SHOW_ROBOTICS workshop UI today.
It's a work in progress. MuJoCo scene with six 25mm cubes laid out in a 2×3 grid. Two cameras (wrist + front).
It plays back synthetic stacking trajectories so I can watch the arm pick and place before committing GPU time to a training run. If the motion looks wrong here, no point training on it.
Most of the day went into inverse kinematics and URDF partial implementation of RoArm Gripper B.
Next: decompose the Gripper B mesh into separate STLs (base, jaws, linkage) and rig the six pivots so the jaws actually open and close in sim.
English
0x_bkt retweetledi


0x_bkt retweetledi
0x_bkt retweetledi
@gumterver100 @base @virtuals_io @caspius_ai @StrikeRobot_ai @SHOW_ROBOTICS @FabricFND @Vader_AI_ @ResearchSynth @shadowcleague @baseapp @SHOW_ROBOTICS is so undervalued with a good team it is so cheap at this price
English
0x_bkt retweetledi

Trending Robotics Projects on @base (last 24h):
■ @virtuals_io $VIRTUAL
■ @caspius_ai $CAS
■ @StrikeRobot_ai $SR
■ @SHOW_ROBOTICS $SHOW
■ @FabricFND $ROBO
■ @Vader_AI_ $VADER
■ @ResearchSynth $R
■ @shadowcleague $SCL

English
Trending Robotics Projects on @base (last 24h):
■ @virtuals_io | solana:3iQL8BFS2vE7mww4ehAqQHAsbmRNCrPxizWAT2Zfyr9y
■ @caspius_ai | $CAS
■ @StrikeRobot_ai | $SR
■ @SHOW_ROBOTICS | $SHOW
■ @FabricFND | $ROBO
■ @Vader_AI_ | $VADER
■ @ResearchSynth | $R
■ @SCL
English
@RoboticsOnBase @base @virtuals_io @caspius_ai @StrikeRobot_ai @SHOW_ROBOTICS @FabricFND @Vader_AI_ @ResearchSynth @shadowcleague @SHOW_ROBOTICS is so under valued
English
0x_bkt retweetledi

Trending Robotics Projects on @base (last 24h):
■ @virtuals_io | solana:3iQL8BFS2vE7mww4ehAqQHAsbmRNCrPxizWAT2Zfyr9y
■ @caspius_ai | $CAS
■ @StrikeRobot_ai | $SR
■ @SHOW_ROBOTICS | $SHOW
■ @FabricFND | $ROBO
■ @Vader_AI_ | $VADER
■ @ResearchSynth | $R
■ @shadowcleague | $SCL

English
0x_bkt retweetledi
Added an RSI page to the @SHOW_ROBOTICS UI today. 28 gaps open. 68 resolved. 28 bugs documented and fixed.
It's the visible tip of what's been running in the background for a week: a loop that picks a gap every twenty minutes, a strategic Opus session at 4am that synthesizes, a memory palace of 122 patterns. Yesterday the loop caught itself rewriting a utility that already existed in the ecosystem and patched its own prompt to never do that again.
On the robot side: stopped testing SmolVLA v3 and v4 today after diagnosing flow matching collapses to the dominant gripper state on imbalanced data. ACT keeps the crown on pick-and-place. v5 retraining on a balanced dataset.
The visible work is a robot getting better at picking up cubes. The invisible work is a system getting better at improving itself. Same project.

English
0x_bkt retweetledi
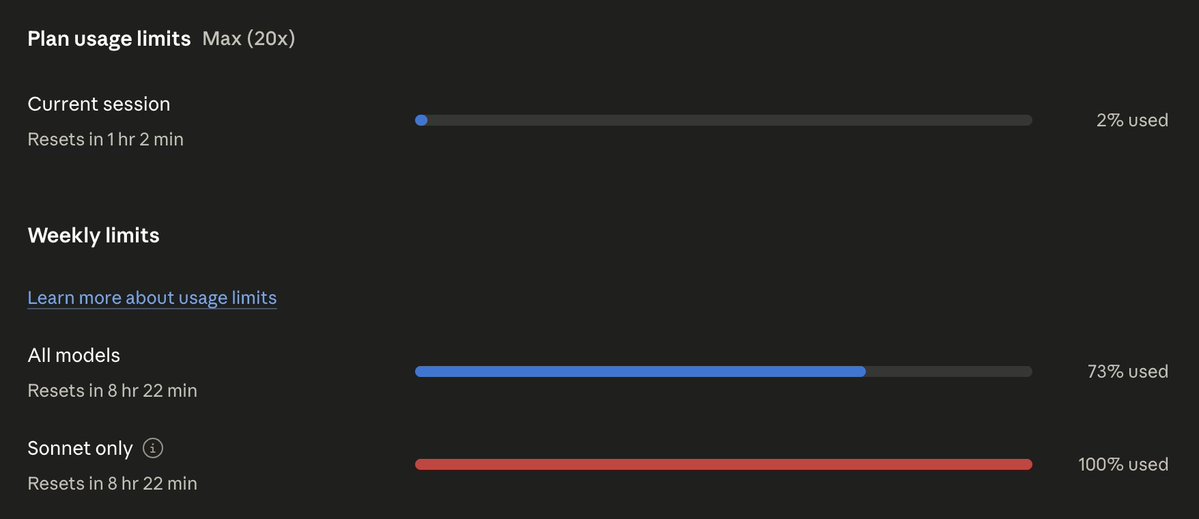
Pick and place VLA training:
- rebalancing episodes (gripper open 40% / closed 60%)
- synthetic data to upsample the under-represented gripper class
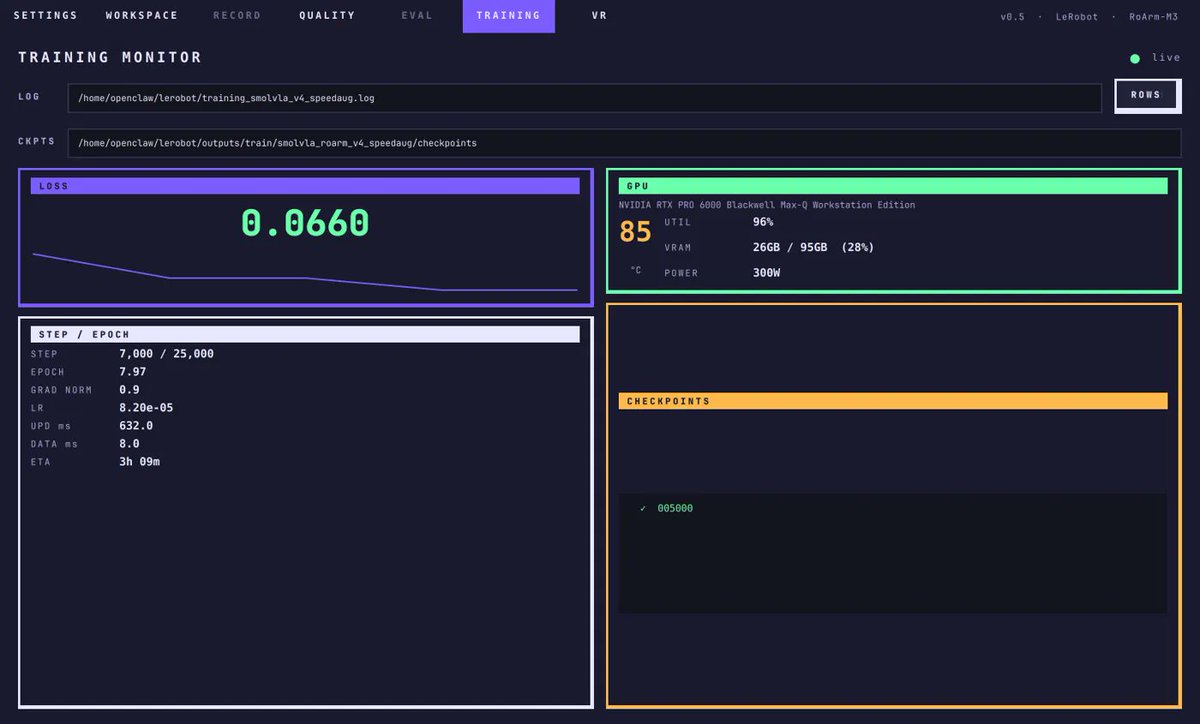
Path to cube stacking -> added two pages to the UI:
- Training: GPU stats, loss, checkpoints, ETA
- VR Teleop: calibration + IK control of the follower arm
metr0x@metrox_eth
23 min of pick and place evals at 20x. 90% success rate ACT v3 025k, trained overnight by the rsi loop. probably nothing.
English
0x_bkt retweetledi
Milestone in ! Next stacking…
metr0x@metrox_eth
23 min of pick and place evals at 20x. 90% success rate ACT v3 025k, trained overnight by the rsi loop. probably nothing.
English
0x_bkt retweetledi