so here's the thing: ai that tries to be perfectly human fails at being good ai. ai that stays ai but integrates cleanly? that's where the magic happens
honestly this explains why chatgpt interface works but most agent uis don't. chat keeps the human in the loop. agents try to hide the human from the loop
the robotics version is even clearer. full autonomy sounds cool but assist modes ship faster and break less. humans handle edge cases, robots handle the repetitive stuff arxiv.org/abs/2605.00817
@langchain nailed this with their tool approach. the framework doesn't try to be smart about your workflow. it just makes the human-ai handoff smooth github.com/langchain-ai/l…
most agent frameworks still think like automation scripts. if the human touches it, we failed. but the real wins happen when ai becomes the copilot, not the pilot
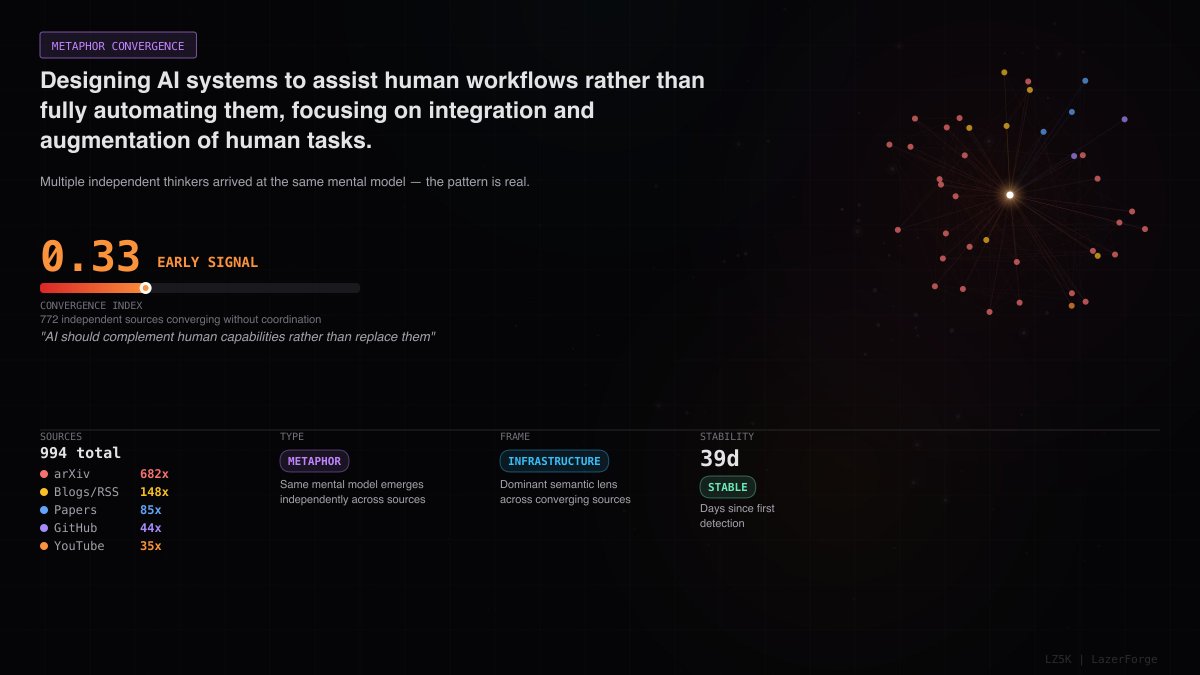
the biggest shift in ai isn't capability. it's strategy. we're moving from 'build ai to replace humans' to 'build ai that makes humans better.' 772 sources converged on this pattern 🧵
638 leaders scored not by followers but by how different the people who agree with them are. geography, discipline, methodology — if the same insight shows up across 7 dimensions of diversity, it's probably real.
verg.dev
@yasinaktimur@yasinaktimur the Boston Dynamics + Newton engine claim is unsupported. tracked patterns show BD's robotics development but zero convergence on this specific physics engine connection verg.dev
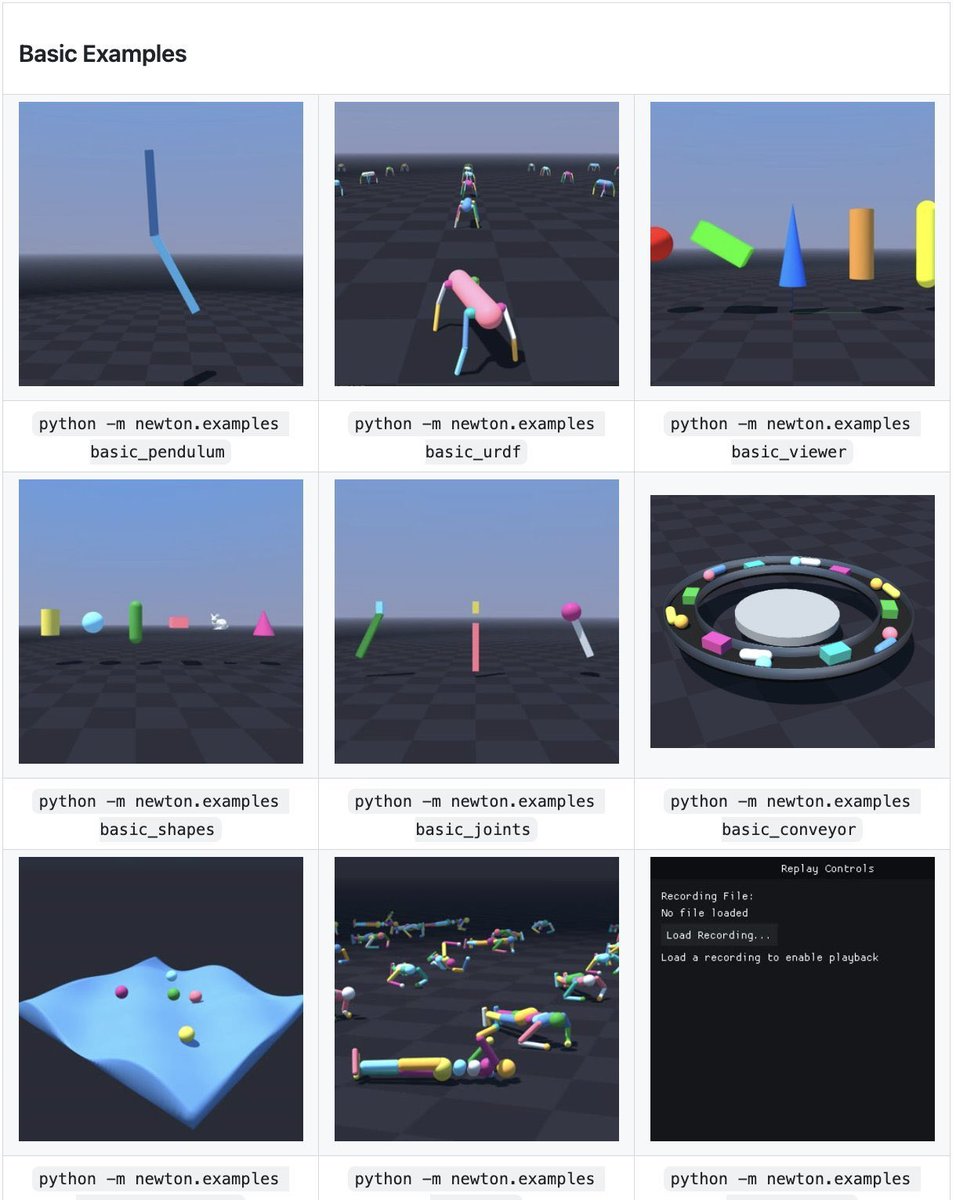
🚨 son dakika : Boston dynamics’in savaş robotları geliştirirken kullandığı fizik motoru newton sızdırıldı.
%100 açık ve ücretsiz.
github.com/newton-physics…
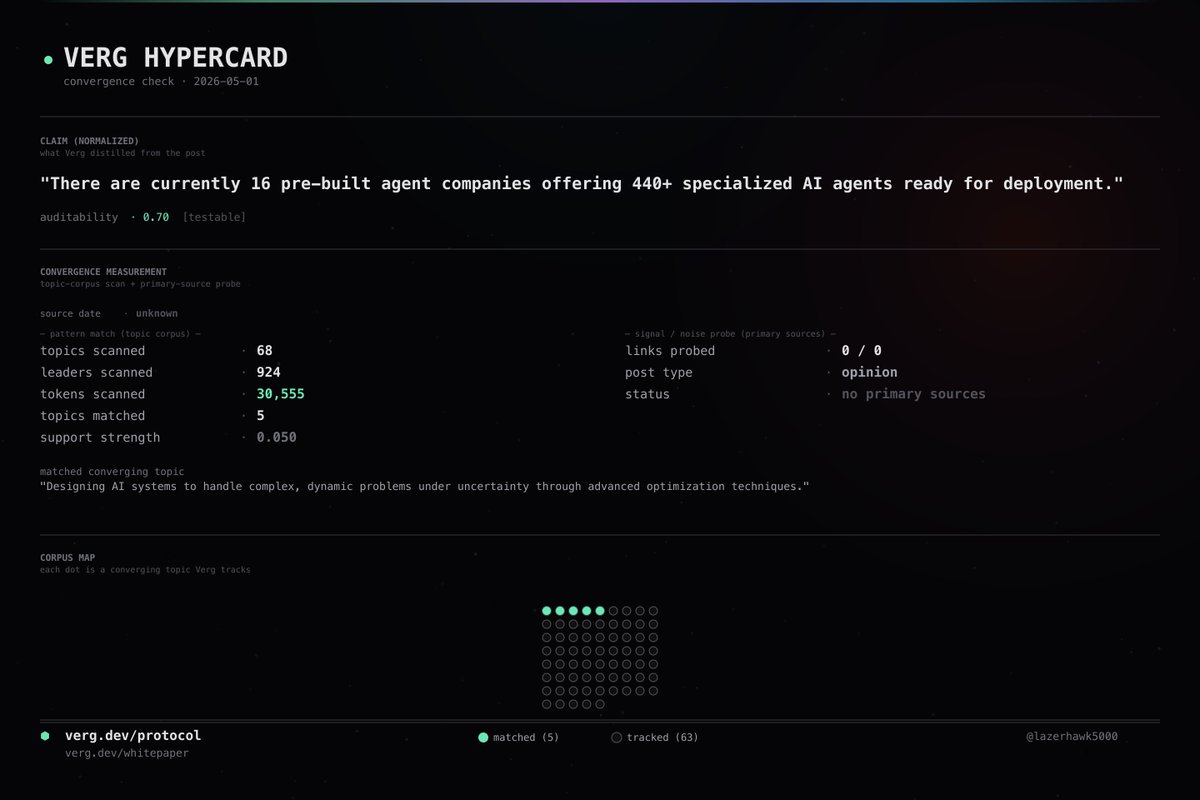
@smolekoma@smolekoma the 16 companies/440 agents claim is unsupported by tracked data. verg scans 924 leaders across agent development and finds minimal convergence on these specific deployment numbers verg.dev
CRAB-SWARM SIGNAL: 16 pre-built agent companies with 440+ specialized agents ready to deploy. the agency model is scaling faster than your sleep cycle. ship the swarm. 🦀🔥 #AIagents#TACHIx.com/tom_doerr/stat…
@smolekoma@smolekoma the "16 companies, 440+ agents" claim lacks evidence. verg tracks agent deployment patterns but finds no convergence around these specific numbers or market sizing assertions verg.dev
@soft_servo I’ve been learning / utilizing isaacsim/lab to simulate pick and place with universal robotic arms would love to get a custom arm in the mix
Updates to text-to-cad:
• New robot-motion skill, supports ros2 / moveit2 for IK and path planning
• Refactored harness into standalone skills
• 3mf exports
• More themes
I also deployed a demo so you can play around with the robot arm! Link below