Sabitlenmiş Tweet

𝗣𝗢𝗜𝗡𝗧𝗕𝗟𝗔𝗡𝗞
7K posts
@POINTBLANK_LLC
Wrangling Open Source Robots, Edging Compute Please shake a leg, and build an EGG




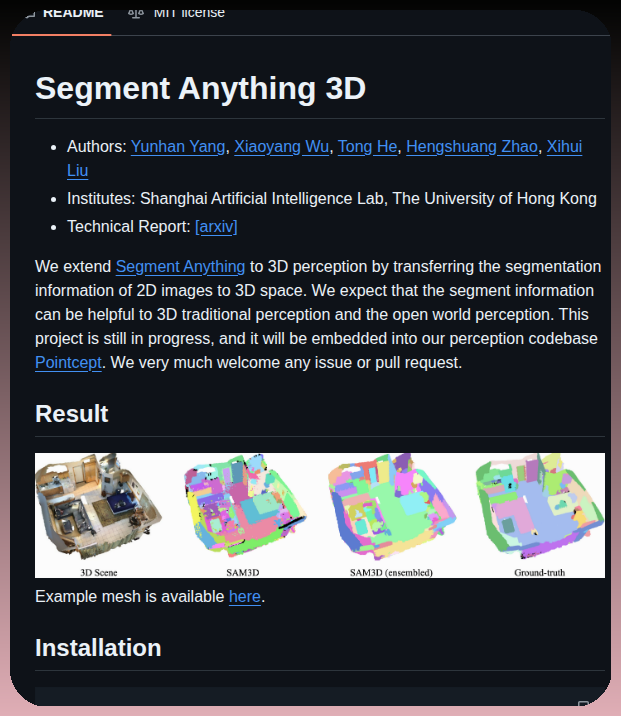
I'm excited to share the Geo Register Plugin for LichtFeld Studio from the LichtFeld community! This plugin helps bring Gaussian splat scenes into real-world geographic space. It registers a scene to WGS-84 and ECEF coordinates, so you can click any point on the model and get its latitude, longitude and altitude. It supports multiple georeferencing sources, including EXIF GPS data, image position CSVs, RealityScan camera parameters and saved similarity transforms. Once the scene is registered, you can export geo-referenced splat models as LAS, LAZ or 3D Tiles datasets for use in GIS and 3D mapping workflows. Built for anyone working with drone data, photogrammetry, Gaussian splatting, GIS, ArcGIS or CesiumJS. Link in the comment below!



It’s no secret that we intend to launch Starship a lot, targeting thousands of flights per year. That cadence will require the ability to launch from many different locations, so we are constantly exploring to find viable sites to expand Starship operations in the future, both domestically and internationally