
splash
67 posts


@JoelDennison4 yeah there weren’t too many long distance ranges in ohio. now that I’m out west you just go onto BLM land. it’s so insanely open out here.

English
packing to get bullet data with the event sensor.
6.5 creed, 556, 22lr, 12ga, and 44mag for good measure.
will probably make a short vid if it's interesting enough.



Zack's Lab@zackslab
ok last bug vid before i start capturing bullets with the event sensor. i thought this one was cool because you can see wings flapping near beginning/end of the capture. the reason there are trails is because i'm assigning pixels an exponential decay in post to get this meteor tail effect. this is 10x slower than real time. the event sensor outputs data at 1us timesteps which is nuts.
English

weekend update: designing a safety frame🦺(in progress...)

Suren Atoyan@suren_at
weekend update: no, noooooooo 😂
English
@younghyo_park do you have this but with one plane being a chacuro board
English

Nobody asked but I'm going to talk about that cuboid in the video anyway :) It's a 3D-printed, 6DoF-pose-trackable cuboid, programmatically generated and tracked with this! github.com/younghyopark/a…
This little cube really helped us isolate control issues from RGB vision problems and clearly realize the importance of low-level controller design decisions.
Younghyo Park@younghyo_park
What's different between these two BC policies? It's the same architecture, training budget, and data collection setup — the only difference is the controller gains! Controller gains are an understudied design parameter in robot learning. In our new work (w/ @BronarsToni*, @pulkitology), we show how they act as an inductive bias across BC, RL, and Sim2Real transfer, with real consequences on performance. Here's what we found 🧵 * Equal Contribution 📄arxiv: arxiv.org/abs/2604.02523 🔗website: younghyopark.me/tune-to-learn/
English

جا کلیدیهای شاهد - ۱۳۶ در چهار رنگ (سفید، خاکستری، صورتی و مشکی) آماده شد!
دوستانی که در ایران هستند، میتونند از کانال بله گالری هنری ایرانیوم سفارش بدن.
🔗 ble.ir/iraniyomart


علیاصغر محرمزاده@aliasghar_1999
یکی از دوستان در حال تولید هستند و به زودی عرضه میشه :)
فارسی
@Crusty_Old_Punk @Tablesalt13 this table salt guy is retarded, psyop to make conservatives look stupid.
English

@Tablesalt13 Not the same "Made in Canada" product. Do you think we can't see the prices in the vide?
English

🚨NEW VIRAL VIDEO
Shows CANADIAN OSB for only $8.70 a sheet in the USA
The price in CANADA? $14 CAD per sheet. ($10 USD)
We PAY MORE for our OWN building supplies, even with TRADE TARIFFS!
How is that EVEN possible??
English

MOGrip: A Gripper for Multi-Object Grasping in Pick-and-Place Tasks via Translational Finger Movements
Researchers at Seoul National University developed a gripper designed to move multiple objects simultaneously to improve the efficiency of pick-and-place operations. The design is inspired by the way humans grasp multiple objects at once.
The gripper can transfer several objects in a single motion and place them at designated locations, which may support manipulation tasks in unstructured environments.
Credit: SNU BioRobotics Lab
#robotics #gripper #technology #engineering #robots #innovation
English
I still cant believe a group of people
got a $2 billion peice of land
because they proved their great-great-grand parents
were seen with severed heads and war slaves on that site
in 1840
English
weekend update: my first (and failed) attempt at multi-material printing. It was supposed to be the corner cover for Ayg’s body. Btw, TPU-for-AMS feels like a scam


English



Introducing text-to-motion. It’s Cursor, but for IRL code. Comment "vibe roboticist" for access
English
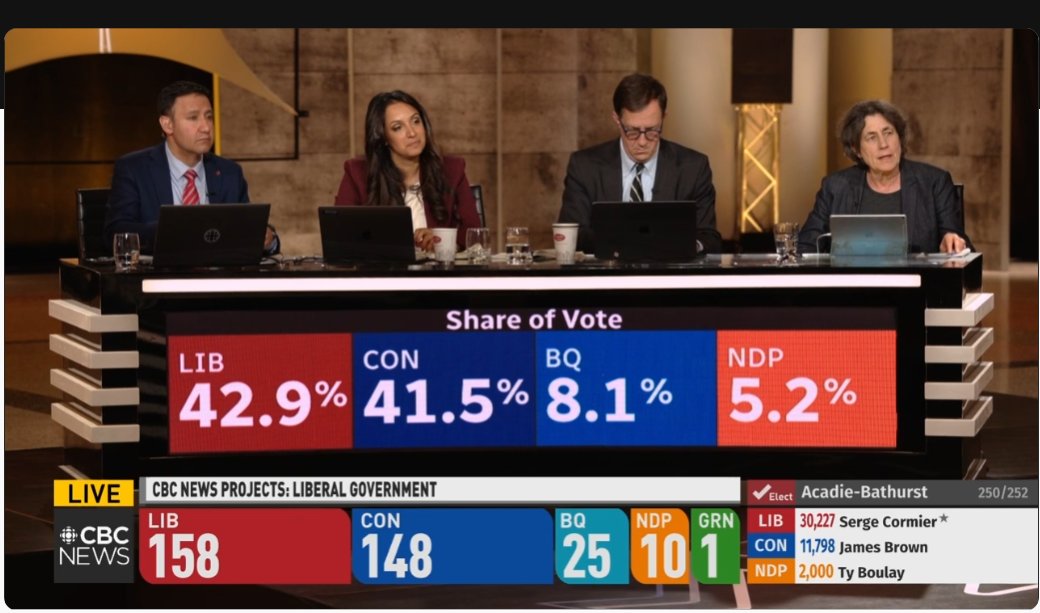
BREAKING
The LPC is now only ahead by 1.4% of the vote
English
Robot folks, want to play around with Isaac-GR00T but don't want to wrangle with dependencies or have an hour to build the Docker image? I'm hosting an image here so you can spin up an instance and start playing around!
English

@haqhuy Very impressive work!
I have a question about the task frame used in the paper. Does it refer to a stationary global frame that never moves during the task time? or does it refer to the relative EE frame in the original UMI paper? (screenshot from the UMI paper)

English

@real_vaishak looks so cool!
Is that piper from agilex? Is it good?
English
From hack to precise automation in under 20 hours. This team be cooking!
English
@cajun_exile @gaiestphaggot @DudespostingWs the coefficient of friction would have no effect on a field since the cleats would dig into the field and its no longer friction as the dominant normal force to the pushing of the nfl guy. They are both on the same ground in both scenrias so equal friction here, your point is iva
English

Most don’t realize how impressive this is
This sumo guy held NFL 6’3 247lb Edge Rusher Micah Parsons like it was nothing
English
@truckdriverpleb “advantageous to me” is the mindset of a coward traitor. Death is only suitable punishment for treason
English

Reasons why becoming an American would be advantageous to me
- 60% reduction in taxes
- gun ownership
- free speech protection
- strongest passport in the world
- access to affordable homes
- healthcare freedom
- world's strongest economy
Food for thought
English
@Ant_giggles @PierrePoilievre Irananians have a higher iq on avergae than canadians, so indeed you will want to import this “third world”
English

@PierrePoilievre Import the third world, become the third world.
English

5 years ago today, 176 people, including 55 Canadians and 30 more who called Canada home, were murdered by the terrorist IRGC on flight PS752.
We honour their memory and pray for the families whose lives were devastated as we fight for justice.
The tyrants in Tehran will never prevail. The Iranian people will be free. And Canada will stand with them in that fight for freedom.
English
