Sabitlenmiş Tweet

"센과 치히로 뮤지컬" 관람했습니다.
3/7 토요일 2시 공연
1층 C15 자리 관람
주연배우는 카와에이 리나님 이였고 다들 연기 훌륭하시고 무대가 바뀌면서 장면이 바뀌는데 너무 자연스럽고 대단하네요. 몰랐는데 무대장치 마저도 사람이 움직이는 거였음..
#센과치히로 #뮤지컬 #지브리


한국어
유난이 Younani
980 posts

@younani_maps
유난스럽지만 긍정적인 일상 기록📍 경제·코인·애니·여행·유머 담음 ✨









Ashok Elluswamy, 테슬라 AI 책임자가 GTC 토론에서 자율주행차와 휴머노이드 로봇의 AI 접근 방식이 근본적으로 유사함을 강조한 내용: 계층적 의사결정은 유용하지만, 그것은 반드시 저수준 제어와 동일한 의사결정 프로세스의 일부로 함께 이루어져야 하는 것임 휴머노이드 로봇에서는 아직 롱테일(long tail)을 충분히 보지 못했지만, 테슬라는 자율주행에서 롱테일을 이미 경험했으며, 이 과정에서 고수준과 저수준 의사결정이 상당히 높은 프레임레이트에서 동시에 이루어져야 했던 것임 옵티머스의 아키텍처는 이와 유사한 방식으로 설계되어 있으며, 계층 구조를 가지지만 모든 것이 하나의 모델 내에서 함께 동작하고, 의사결정 과정에서 발생하는 지연(latency) 또한 잘 모델링되어 있는 구조임 이러한 아키텍처는 휴머노이드 로봇에서도 매우 잘 확장될 것임 의사결정 수준의 구분은 개발자의 머릿속에만 존재하는 개념일 뿐이며, 모델 입장에서는 의사결정이 연속적인 공간으로 존재하고, 이를 더 세밀하게 혹은 더 거칠게 조정할 수 있는 파라미터(dial)가 존재하는 것임 휴머노이드는 자율주행보다 더 다양한 센서 모달리티와 더 높은 자유도를 가지지만, 근본적인 제약 조건은 동일함. 즉, 실시간 의사결정이 필요하다는 점임. 제어 신호 출력에는 분명 계층이 존재하지만, 가장 낮은 주파수의 의사결정이 너무 낮아서는 안 되며, 로봇의 안전성이 매우 낮은 주파수에서 동작하는 시스템에 의존해서는 안 되는 것임


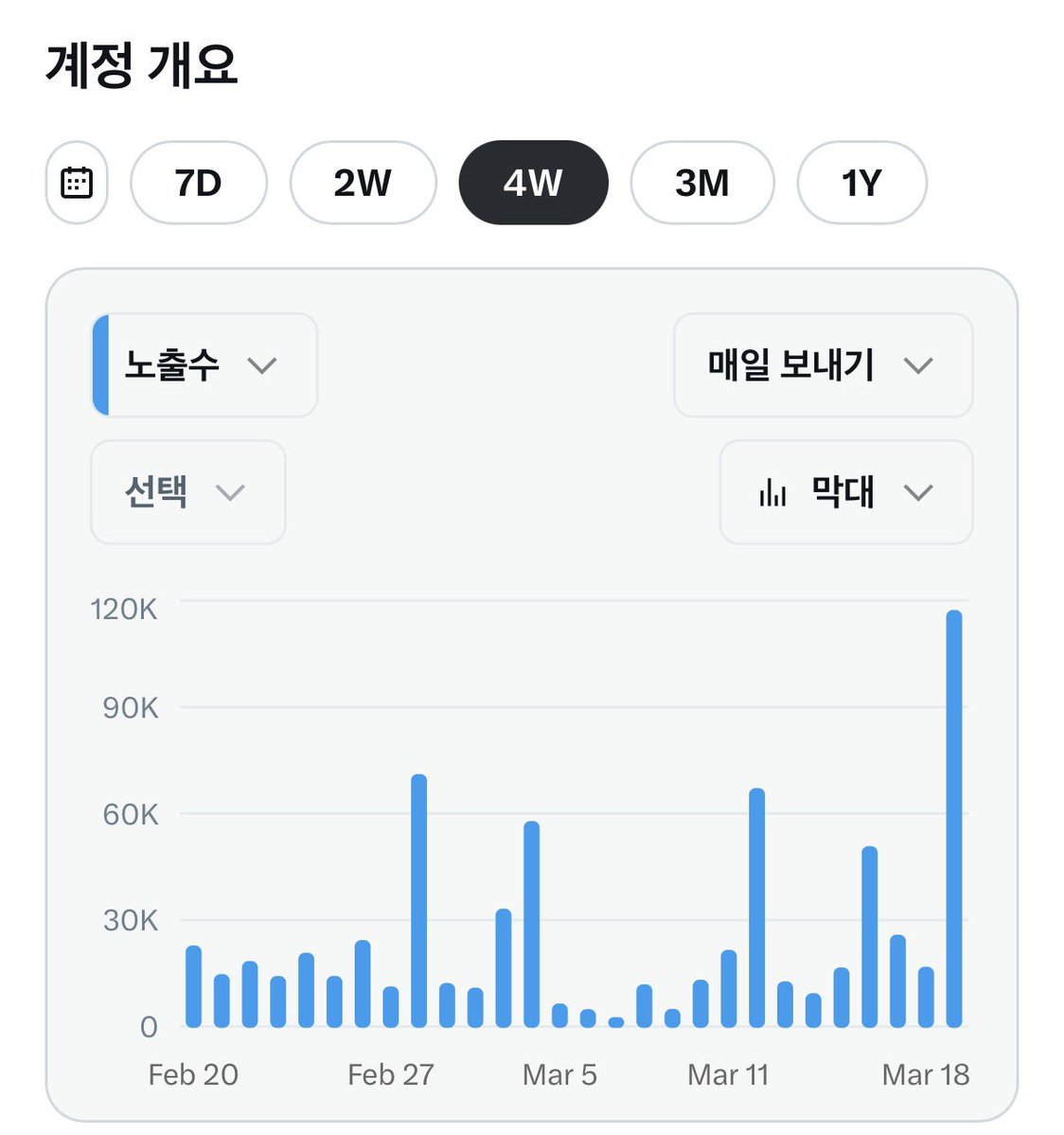
게시물 조회수 터진게 없는데 멀까요..? 버그인가..?🪲