Sabitlenmiş Tweet

AI is writing papers.
Scientists are still loading centrifuges.
We have built a perception, control, and manipulation stack that lets robots run experiments flexibly in scientific labs. We exist to expand the boundary of what is possible to automate today.
Over the next week, we’ll share deeper dives into how our world models, mesh systems, motion planning, and LLM agents come together to make it possible.
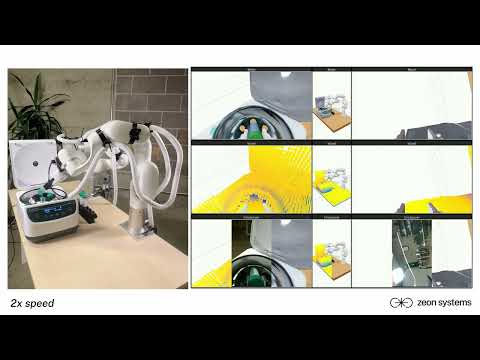
Centrifuges are everywhere in science - and a nightmare for automation. Here’s a quick preview of our system loading tubes into one.
English