Закреплённый твит

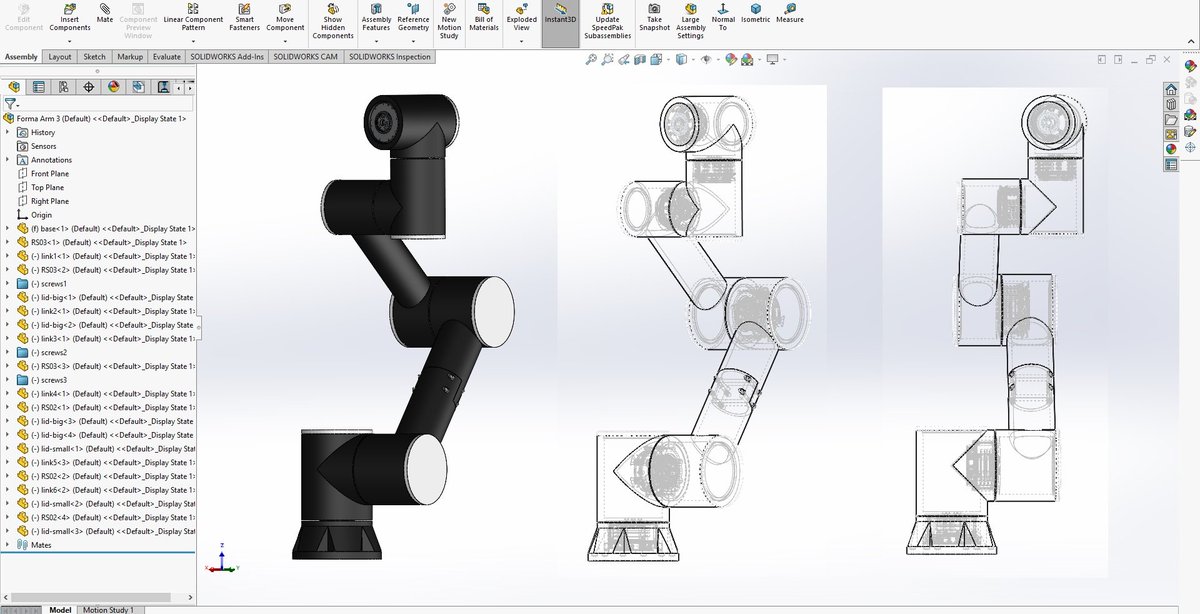
The Forma Arm is now officially live.
This is our open-source modular robotic arm - designed for real-world deployment, affordable fabrication (3D printable), and built with interchangeable joints.
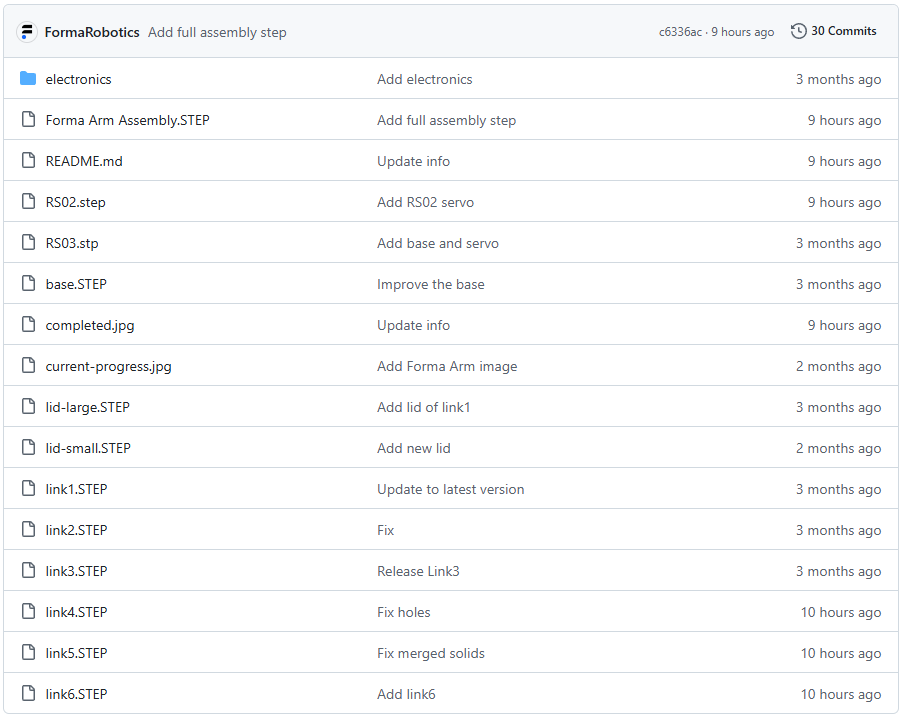
The repository includes:
• Complete modular CAD files (Base + Link1–Link6 + servo modules)
• Circuit diagram
• Full Bill of Materials (hardware + servos)
• Assembly structure ready for iteration and improvement
Everything is open for builders, researchers, students, and anyone who wants to experiment with robotics in a practical way.
🔗 GitHub Repository:
github.com/FormaRobotics/…
This is the foundation.
We’ll continue adding electronics details, improvements, and new attachments as we progress.
English