[Series 4 | System Identification & Estimation | #11]
#TargetTracking #KalmanFilter #RobustEstimation #Estimation
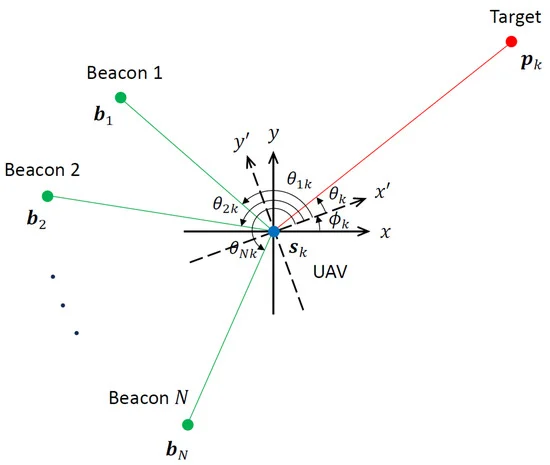
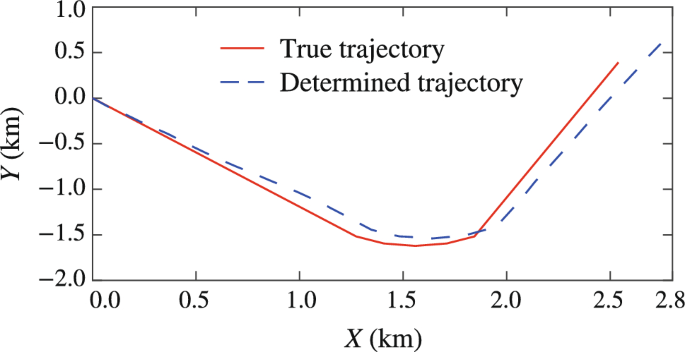
🎯📡 How can bearings-only tracking remain accurate under non-Gaussian noise?
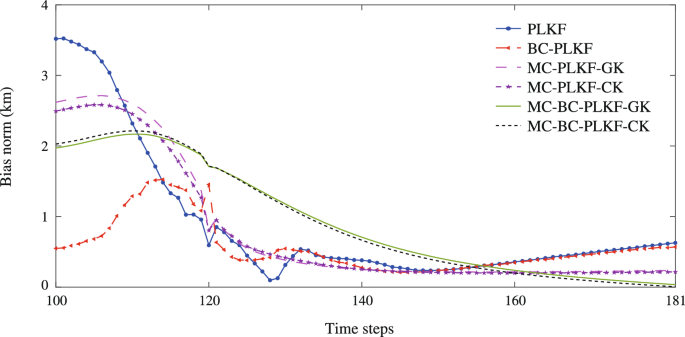
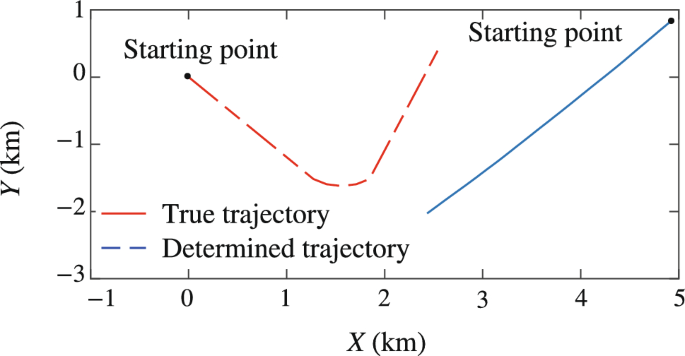
This work develops a maximum correntropy–based pseudolinear Kalman filter, providing robust estimation in the presence of outliers and heavy-tailed noise.
Title: Maximum correntropy-based pseudolinear Kalman filter for passive bearings-only target tracking
Authors: Asfia Urooj and Rahul Radhakrishnan
Full Text: link.springer.com/article/10.100…
English




![Giacomo [ˈd͡ʒaːkomo] Bergami, PhD](https://pbs.twimg.com/profile_images/1857885915621867520/aLmVDazY.jpg)