steerFocus@steerF0cus
AB üyesi olmadan AB’nin marka arabalarını korumak için yaşanan bürokratik engel hakkında.
görülen gereklilik üzerine ;
İspat 1: Veri Yolu İzolasyonu (Topolojik Sınırlar)
• Veri: Cihaz, aracın X179 konnektörü üzerinden ETH (caneth) veri yoluna bağlanmaktadır.
• İspat: Tesla'nın ağ mimarisinde Kritik Sürüş Sistemleri (ESP/Frenler, EPAS/Direksiyon) Chassis CAN üzerinde; motor sürücüleri (Inverter) ise Powertrain CAN üzerinde kapalı döngü (closed-loop) çalışır.
• Sonuç: ETH veri yoluna enjekte edilen mesajlar, Ağ Geçidi (GTW) tarafından donanımsal olarak filtrelenir. CanFeather.ino kodunun ETH hattına gönderdiği sinyallerin (örneğin ID 1021), şasi hattındaki fren aktüatörlerini veya motor tork haritasını doğrudan tetiklemesi topolojik olarak mümkün değildir.
İspat 2: Hedeflenen Veri Paketlerinin Kapsamı (Protokol Analizi)
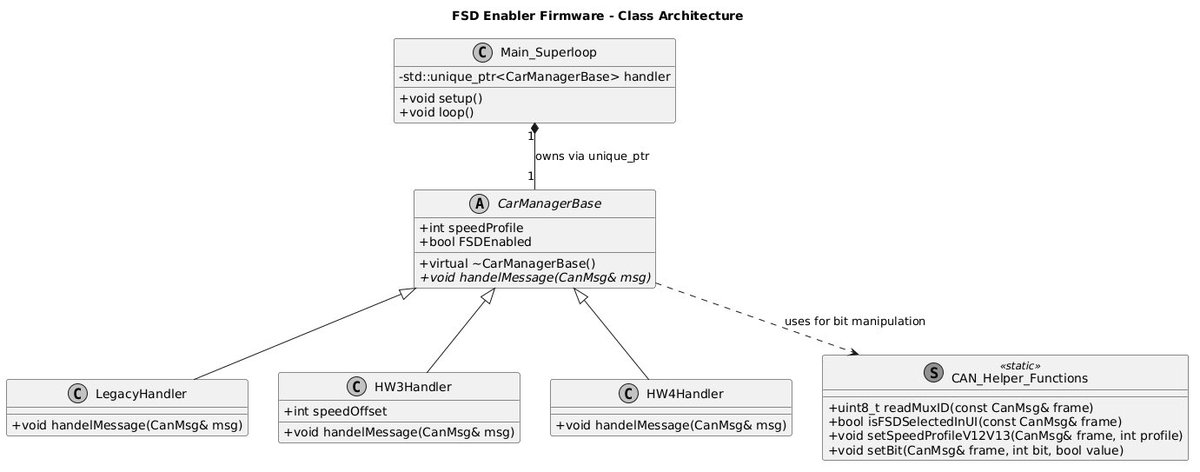
• Veri: CanFeather.ino kodundaki handelMessage fonksiyonları yalnızca belirli CAN ID'lerini (1006, 1016, 1021) hedef alır ve sadece belirli bitleri (Bit 46, Bit 60) değiştirir.
• İspat: ModelY_ETH.compact.json (DBC/JSON veri tabanı) dosyası incelendiğinde, bu mesaj kimliklerinin usage matrisinde yalnızca odin (Bilgi-Eğlence), sui (Ekran) ve ui modülleri tarafından tüketildiği görülmektedir.
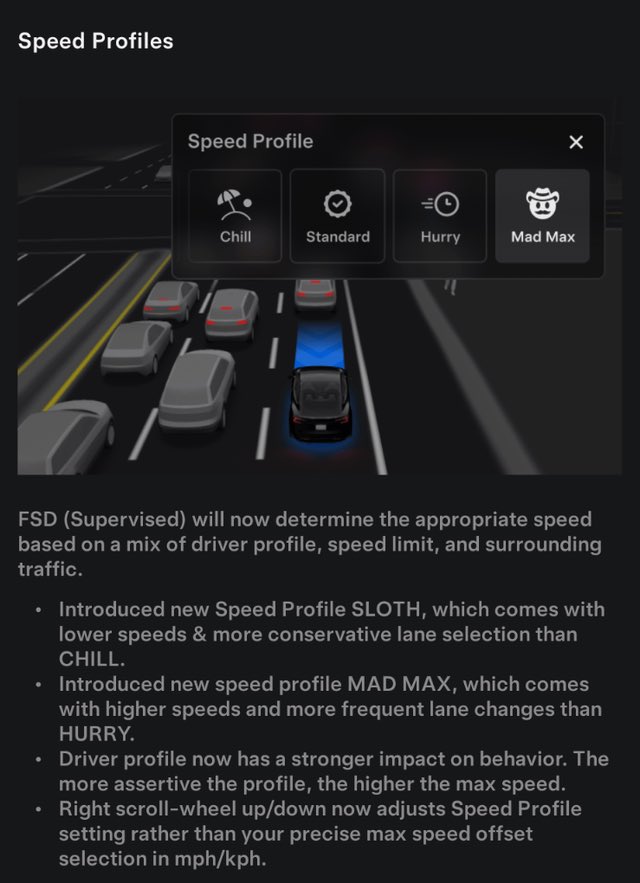
• Sonuç: Yapılan müdahale, fiziksel sürüş komutlarını değil, yalnızca İnsan-Makine Arayüzü (HMI) durum bayraklarını (FSD görselleştirme izni gibi) kapsamaktadır. Otopilot bilgisayarının (HW3/HW4) kamera işleme ve karar verme algoritmalarına (Neural Net) veri gönderilmemektedir.
İspat 3: Aktif ECU Susturmanın Olmaması (Teşhis ve Güvenlik Protokolü)
• Veri: İncelenen yazılımda UDS (Unified Diagnostic Services) protokolüne ait Service 0x31 (Routine Control) komutları bulunmamaktadır.
• İspat: Bir aracın güvenlik sistemlerini devreden çıkarmak veya kalıcı olarak kontrolü ele almak için, orijinal ECU'nun periyodik yayınını durduracak spesifik UDS komutlarının (Örn: 0x31 01 02 00) ağ geçidinden geçirilmesi gerekir.
• Sonuç: Modül, orijinal ECU'ları susturmamakta; yalnızca CSMA/CD+AMP tahkim kuralları dahilinde saniyelik "tampon bellek üzerine yazma" (buffer overwrite) işlemi yapmaktadır. Aracın Acil Durum Frenleme (AEB) ve çekiş kontrol (Traction Control) modülleri fabrikasyon güvenlik verilerini kesintisiz olarak yayınlamaya devam eder.
İspat 4: Hata Durumunda Sistemin Davranışı (Failsafe Mekanizması)
• Veri: Modül, orijinal veriyi okur (Rx), modifiye eder ve gecikmesiz olarak hatta tekrar yazar (Tx).
• İspat: Eğer Arduino/Feather modülü güç kaybeder, SPI darboğazı yaşar veya kod döngüsünde (superloop) bir hata meydana gelirse, veri yoluna sahte mesaj basımı anında durur.
• Sonuç: Orijinal ECU'lar zaten yayın yapmaya devam ettiği için, modülün devreden çıkması durumunda ekran (UI) mili-saniyeler içinde orijinal GTW verilerini okumaya başlar. Sistem donanımsal doğası gereği "Güvenli Başarısızlık" (Fail-Safe) modunda çalışır; otopilot devreden çıkar ve araç standart sürüş dinamiklerine kayıpsız bir şekilde döner.