
iamlogtun.eth
8.1K posts

iamlogtun.eth
@iamlogtun
Web3 Educator 📚| Ambassador @puffer_finance 🐡& @axisrobotics | Video Content Creator 📹
Metaverse انضم Ağustos 2022
1.1K يتبع1.2K المتابعون

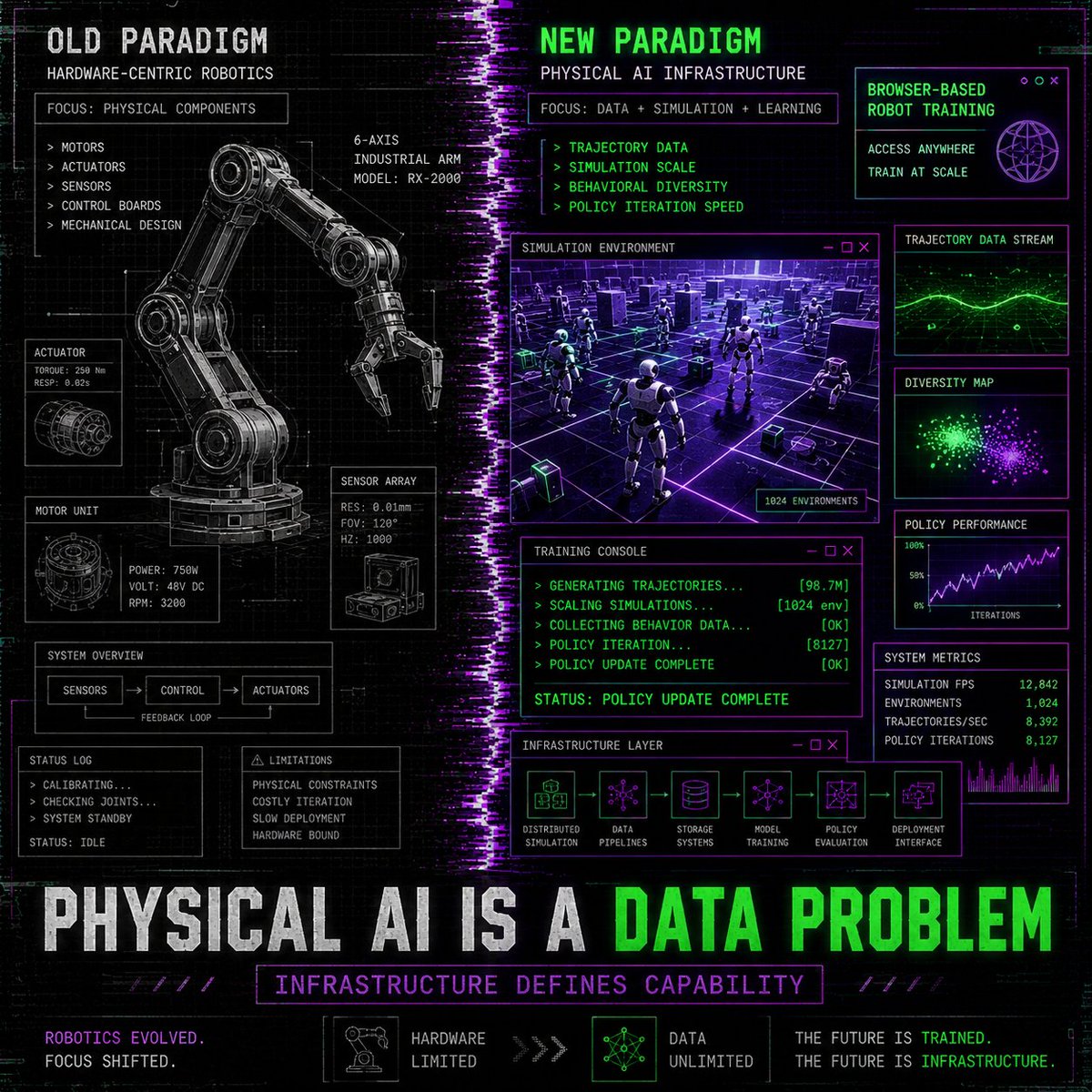
Most people still analyze robotics from the hardware layer.
That’s outdated.
The real bottleneck is:
trajectory data
simulation scale
behavioral diversity
policy iteration speed
Physical AI is increasingly becoming a data infrastructure problem.
That’s why browser-based robotic training systems are architecturally interesting.
@axisrobotics
English

Ethereum scaled with rollups but fragmentation came with it.
What if appchains could scale independently, while still feeling like one unified chain? No bridging, no siloed liquidity nor fragmented UX
@puffer_unifi enables synchronously composable based appchains powered by @ethereum itself.
@puffer_finance @puffer_unifi @puffer_preconf @AmirOnchain @StecoinZhang @art3chris
English




Many people think synchronous composability just means “fast bridging.”
It does not. It means solving three separate infrastructure problems simultaneously for based appchains.
1. L2 → L1: withdrawing from L2 to L1 without waiting long time.
2. L1 → L2: accessing L1 liquidity from L2 without trusting a third-party bridge.
3. L2 → L2: coordinating atomic execution across separate based appchains.
Starting with L2 → L1 — the capital efficiency problem.
The problem: rollup withdrawals require verification that the rollup state is valid before Ethereum releases funds. Optimistic rollups enforce a 7-day challenge window. Even ZK rollups can take minutes or even hours. Capital becomes trapped between layers. Institutions cannot operate efficiently. DeFi liquidity fragments.
The @puffer_unifi solution: proof-generated bridging.
TEE provers — Intel TDX and AMD SEV — independently re-execute the rollup state transition. Both must agree. The L1 rollup contract verifies the proof on-chain. Funds are released atomically.
No long time wait. No third-party attestation. No off-chain verifier to compromise.
TEE is live today. ZK proving is next. As ZK matures, it joins the prover multisig alongside TEE, adding a second independent trust assumption.
The fast withdrawal from L2 to L1 is not released because time passed, but it is released because the rollup state was verified.
Next up: L1 → L2 and L2 → L2. 🐡

English

Why Data Is the Backbone of Robotics 🤖
The AI boom was built on internet-scale data.
The robotics revolution will be built on something far harder to obtain:
Physical interaction data.
And this is exactly where projects like @axisrobotics are focusing their vision. 🧵 👇

English
@Sam_wolf1122 @axisrobotics Where do you see the funding details bro?😎
English

Why is everyone talking about @axisrobotics?
1️⃣ The Tech: A 6-axis control stack for total deterministic movement.
2️⃣ The Lead: Dr. G, a veteran in industrial kinematic control.
3️⃣ The Backing: $5M seed round led by Galaxy
Here is a professional breakdown 🧵👇

English

𝗪𝗵𝘆 𝗗𝗮𝘁𝗮 𝗶𝘀 𝘁𝗵𝗲 𝗕𝗮𝗰𝗸𝗯𝗼𝗻𝗲 𝗼𝗳 𝗥𝗼𝗯𝗼𝘁𝗶𝗰𝘀
Everyone understands why ChatGPT needed the internet.
Billions of web pages, articles, books with all of it scraped, cleaned, and fed into a model until it could think in language.
Robots need the same thing. But there's a catch:
The internet doesn't teach a robot how to move.
LLMs run on text. Robots run on physical interaction data with how to pick up an object, navigate a space, respond to resistance, recover from failure.
That data doesn't exist on Google. It has to be generated.
And that's exactly the gap Axis is filling with one contributor task at a time.
The data problem for robotics is the biggest bottleneck in physical AI right now.
Whoever solves it, wins. (@axisrobotics)

English

The lookahead is what makes based sequencing credible.
Gateways know their slot windows in advance. State syncs before transitions. Preconf issuance remains continuous across every slot.
For UniFi appchains, this means L1 and L2 share not just a sequencing root, but a predictable, coordinated execution environment where users always know who is sequencing and when.
Deterministic by design. Not a soft promise. 🐡
Puffer Preconf@puffer_preconf
📖 Glossary: Lookahead Mechanism A schedule that maps upcoming Ethereum L1 slots to their assigned proposer, who delegates sequencing rights to a gateway, revealed approximately one epoch (~6.4 minutes) in advance. The lookahead mechanism gives rollups predictability over who provides preconfirmations and when. Before each slot transition, the outgoing gateway syncs state with the incoming one, ensuring continuous preconf issuance without gaps. Puffer Preconf translates that structure into fast, coordinated execution across rollups. 🐡
English
@puffer_preconf Solid infrastructure play by the Puffer team. 🐡🚀
English

📖 Glossary: Lookahead Mechanism
A schedule that maps upcoming Ethereum L1 slots to their assigned proposer, who delegates sequencing rights to a gateway, revealed approximately one epoch (~6.4 minutes) in advance.
The lookahead mechanism gives rollups predictability over who provides preconfirmations and when. Before each slot transition, the outgoing gateway syncs state with the incoming one, ensuring continuous preconf issuance without gaps.
Puffer Preconf translates that structure into fast, coordinated execution across rollups. 🐡

English

while touching grass, let’s learn a little about AXIS
everyone talks about AI robots like the hard part is the model. Is it really?
the bottleneck is data.
LLMs had the internet.
physical AI has almost nothing.
that’s the gap @axisrobotics is trying to solve @iamlogtun

English

🔥 Strong energy throughout #InnovateMiami by @TheTieIO alongside @consensus2026!
From packed discussions on institutional crypto and market structure to nonstop conversations around Ethereum infras, it was great to see the level of engagement around what Puffer is building.
Institutional crypto is just getting started! 🐡
English
English

𝐖𝐡𝐲 𝐢𝐬 𝐃𝐚𝐭𝐚 𝐭𝐡𝐞 𝐁𝐚𝐜𝐤𝐛𝐨𝐧𝐞 𝐨𝐟 𝐑𝐨𝐛𝐨𝐭𝐢𝐜𝐬?
--> Currently , we are talking about how Ai Can Fast Learning Everything Now a Days .
Ex - :
(LLM ) Large Language Model has Learning Billion web pages , Books ,videos , other Ralated Real world Interaction By Information Data Learn Via Internet.
--> However, robots do not learn merely by "reading."
For them to learn, they require doing.
-> Physical interaction data is crucial for a robot:
-> How much force to apply when lifting an object
-> How to maintain balance while walking
-> How to react if an object slips or breaks
-> How to handle real-time environmental changes
--> This constitutes the biggest difference between AI models and robots.
--> Internet data teaches AI to understand language.
But physical-world data teaches robots to understand the real world.
--> Every movement a robot makes, every sensor reading, every camera frame and even its mistakes transform into learning data.
--> In robotics, data is not merely information.
It is the "experience" gained by a robot.
--> In the future, the companies that will dominate the field of robotics won't be those with just better models-
but rather those with superior real-world interaction data.
@axisrobotics @iamlogtun

English

“If you desire to understand intelligence, do not merely study thought, study interaction.”
Had Leonardo da Vinci lived in the age of robotics, he probably would’ve obsessed over one thing above all else:
Data.
Not abstractly.
Not theoretically.
But data gathered

English
@StecoinZhang Puffer Preconfs is the missing piece: instant cryptoeconomic commitments without compromising Ethereum’s settlement guarantees. Bullish 🔥
English
Finality time is the binding constraint most people overlook.
It determines four things:
1. UX: users cannot be certain a transaction is complete until finality. Soft confirmations are fast, but not final. Applications that require finality before proceeding are directly constrained.
2. Capital efficiency: capital locked during a finality window carries opportunity cost. A 7-day optimistic rollup challenge period means 7 days of unavailable capital — unacceptable for institutional deployment.
3. DeFi risk: liquidations must execute before positions become undercollateralized. Slow finality means liquidators cannot act on confirmed prices quickly enough. Bad debt accumulates in the gap.
4. Cross-chain composability: destination chains cannot safely act on source-chain events until those events are final. The longer the finality window, the longer assets remain locked or inaccessible across layers.
Ethereum economic finality: ~12.8 minutes (2 epochs). Secure, but too slow for any of the above.
@puffer_preconf does not change Ethereum’s finality time. It provides a cryptoeconomic commitment before finality arrives — sub-100ms signed execution receipts from gateways backed by slashable collateral.
Break the commitment, lose collateral. Users are compensated on-chain.
The finality window stays 12.8 minutes. The effective user latency becomes sub-100ms (targeting sub-10ms).
Settlement stays on Ethereum. Same security model. Compressed execution experience. 🐡

English