Angehefteter Tweet
cuRobo is now open source under Apache 2.0.
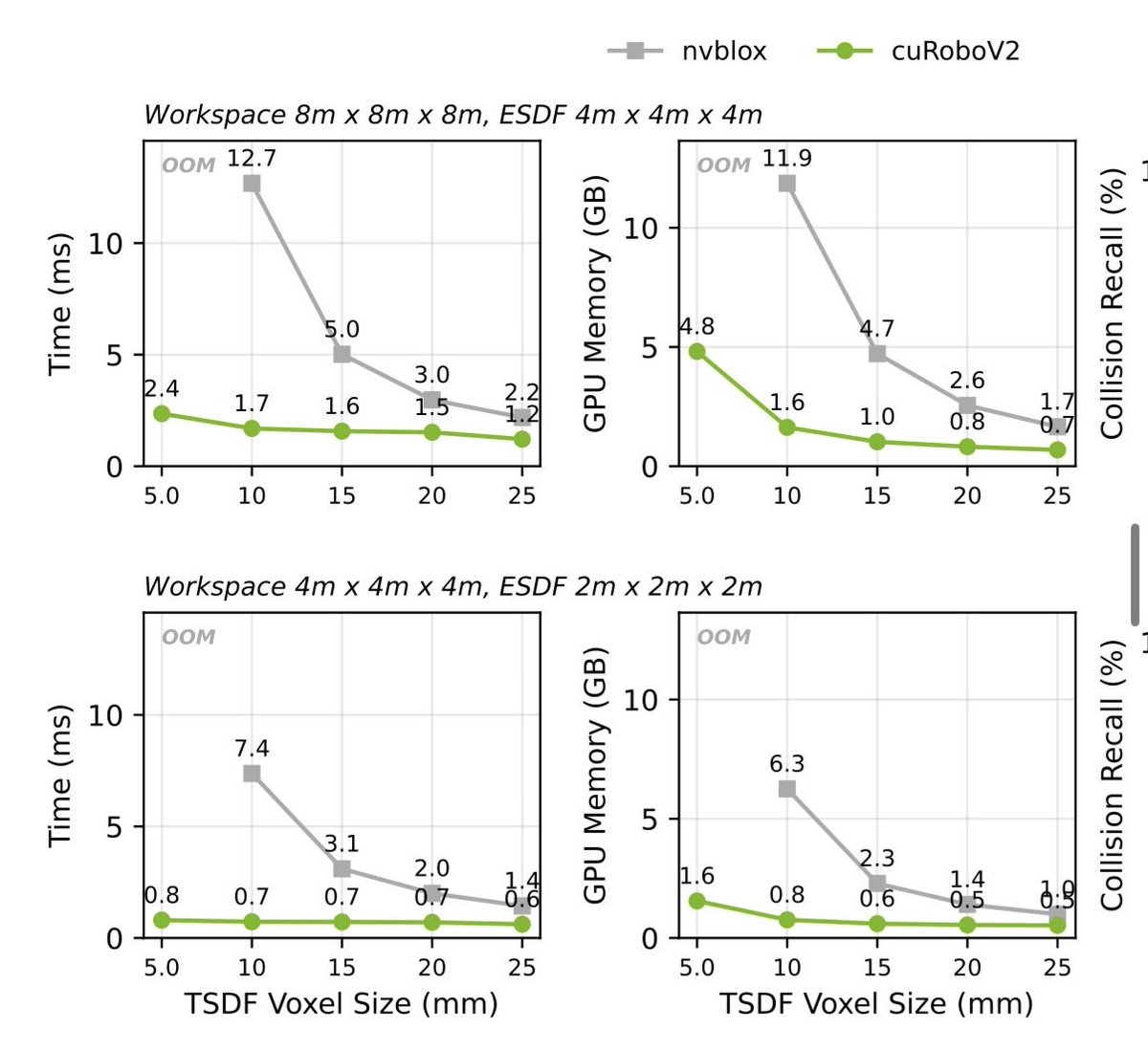
cuRoboV2 adds <1 ms GPU-native TSDF/ESDF semantic mapping, whole-body IK/MPC and trajectory optimization for humanoids, ~50 ms torque-limited planning.
Report: arxiv.org/abs/2603.05493
Code: nvlabs.github.io/curobo
English