𝗤𝗨𝗔𝗡𝗧𝗨𝗠_ 🌬@0x_Quant69
3 ways to stand out as an applicant for the @PrismaXai Regional Ambassador Program.
Even though I won’t be applying myself since I still feel my contributions are low at the moment, I think sharing these could help others improve their edge.
A lot of people will apply.
But only a few will actually stand out.
Here are 3 things I think could make a real difference:
1. 𝗕𝗲𝗰𝗼𝗺𝗲 𝘁𝗵𝗲 𝗹𝗼𝗰𝗮𝗹 𝘃𝗼𝗶𝗰𝗲 𝗼𝗳 𝗣𝗿𝗶𝘀𝗺𝗮𝗫
Don’t just repost updates.
> Explain PrismaX in your own region’s language, culture, and style.
Why this stands out:
Most communities grow when people feel understood locally. PrismaX already said ambassadors own regions and maintain local-language content.
So, in essence:
🔹 Regional posts are part of the role
🔹 Local onboarding matters
🔹 Translating complex robotics ideas simply makes you valuable
Simple example:
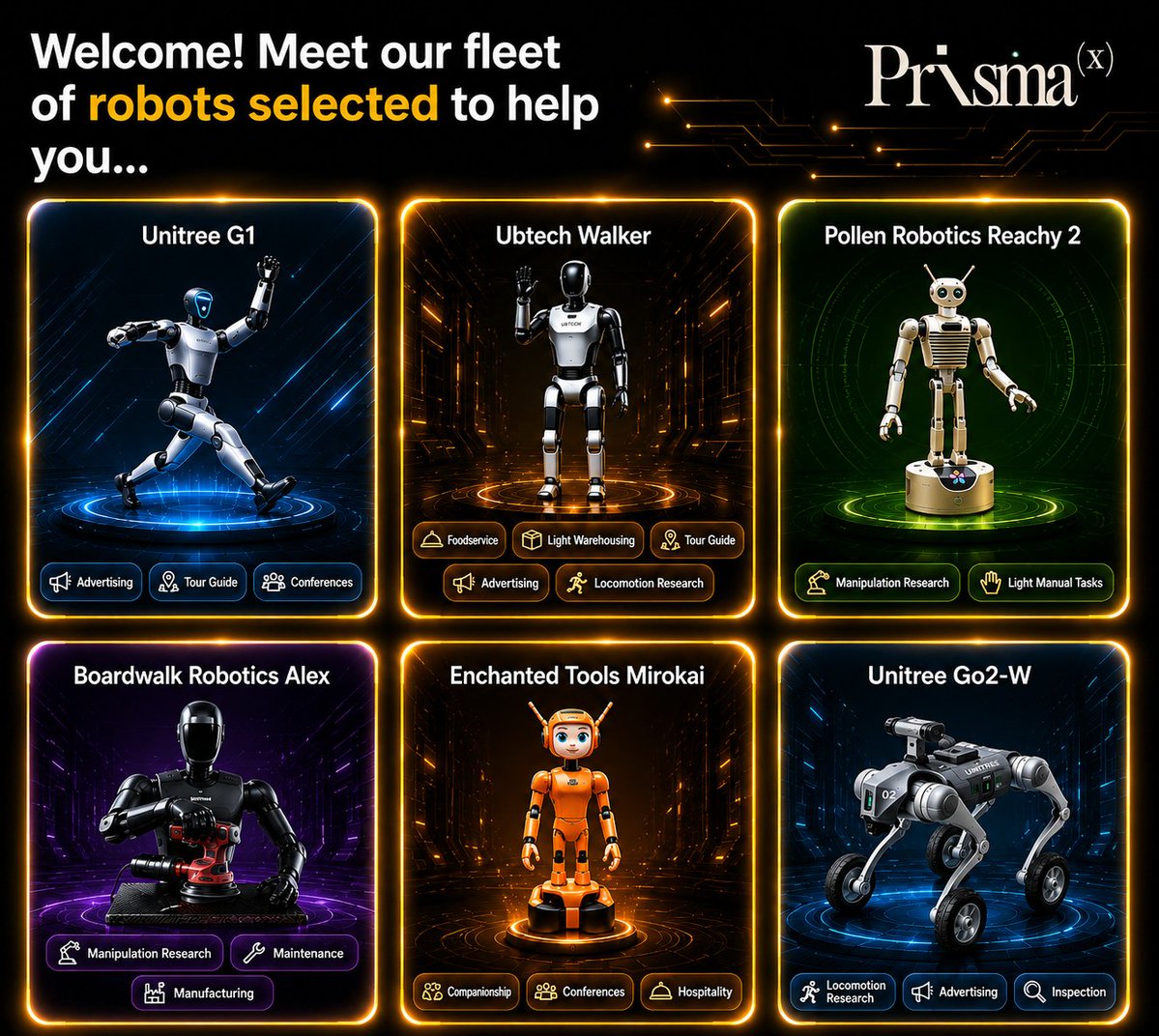
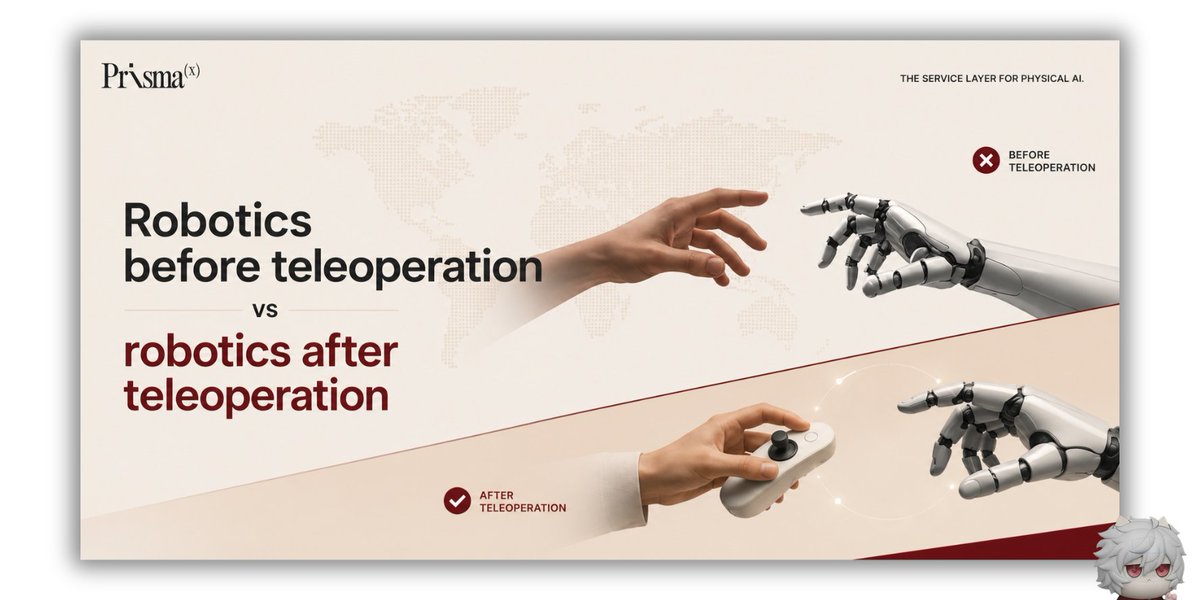
Instead of posting teleoperation infrastructure, explain:
Humans helping robots complete tasks remotely.
That makes onboarding easier.
2. 𝗦𝗵𝗼𝘄 𝗿𝗲𝗮𝗹 𝗰𝗼𝗻𝘀𝗶𝘀𝘁𝗲𝗻𝗰𝘆 𝗯𝗲𝗳𝗼𝗿𝗲 𝗮𝗽𝗽𝗹𝗶𝗰𝗮𝘁𝗶𝗼𝗻
Many people appear only when rewards arrive.
> The strongest ambassadors usually contribute before opportunities become public.
Why this stands out:
PrismaX specifically said they prioritize:
• active Discord members
• progression system contributors
• helpful participation
Your Consistency proves:
🔹 reliability
🔹 long-term interest
🔹 community understanding
Simple examples:
• Answer beginner questions
• Join office hours regularly
• Participate in discussions
• Share useful summaries after events
Small actions repeated often build reputation.
3. 𝗖𝗿𝗲𝗮𝘁𝗲 𝗲𝗱𝘂𝗰𝗮𝘁𝗶𝗼𝗻𝗮𝗹 𝗰𝗼𝗻𝘁𝗲𝗻𝘁 𝗽𝗲𝗼𝗽𝗹𝗲 𝗰𝗮𝗻 𝗮𝗰𝘁𝘂𝗮𝗹𝗹𝘆 𝘂𝘀𝗲
A lot of people make hype posts.
> Very few make useful content.
Why this stands out:
PrismaX ambassadors are expected to create tutorials, walkthroughs, and educational content around teleoperation and robotics.
Good educational content helps:
🔹 onboard new users
🔹 reduce confusion
🔹 grow the ecosystem faster
Simple content ideas:
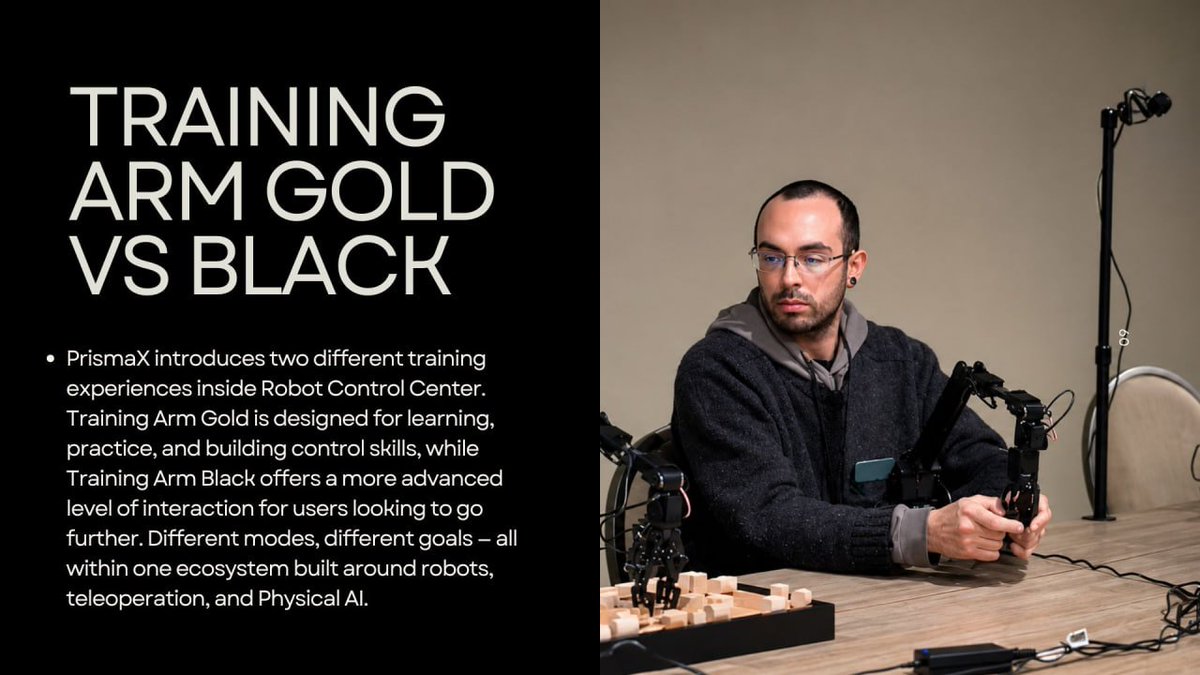
• How PrismaX teleoperation works
• What operators actually do
• How robot training data improves AI
• visual explainers and feedbacks
• short videos
• beginner threads
If people learn from you consistently, you become hard to ignore.
May the best applicant wins 🫶🤖
___________+__________
All the useful links for PrismaX-
Discord - discord.gg/prismaxai
Linktree- t.co/ipHnnMfn5Q