Andrew McCalip@andrewmccalip
Spicy take. I think humanoids are a terrible idea until at least one of these criteria is met.
≥ human level intelligence
≥ human level dexterity
If we’re not at parity on at least one, it’s not going to pencil out. Full stop. It’s just not economically viable. How could it be, when you can literally hire a person? Humans are SO absurdly good. For $15–$75/hr I can have a system with the following specs:
• 20 W multimodal self-training 100 petaflop supercomputer
• 18 years supervised + unsupervised pretraining (publicly funded)
• ATP-based biochemical energy system (accepts donuts)
• 50 MP stereo vision on 3-DOF gimbal with dynamic range adaptation
• 244-DOF compliant actuator network with haptic feedback
• Self-healing, self-repairing, self-assembling biological substrate
• ~5 million analog force-feedback sensors across digits and dermis
• Autonomous recharge via oxidative metabolism (~16 h duty cycle)
• Recursive genome-encoded firmware with continuous self-updates
• Natural language interface with context-adaptive inference
• Multi-objective optimizer (survival, novelty, dopamine gradients)
• Emotionally fault-tolerant stochastic control architecture
• Multi-sensor fusion: proprioception, vestibular, nociceptive arrays
• Adaptive gait control with terrain classification and self-righting
• Wideband acoustic output for communication and threat signaling
• Olfactory chemical sensing array (volatile organic detection)
• Load-bearing skeletal truss with self-lubricating joints
• Hydrophobic dermal coating with cellular self-regeneration
• Distributed thermal management via vasodilation and evaporative sweating
• Predictive maintenance through pain and fatigue heuristics
This is how I look at it: can I make money on it versus hiring a person?
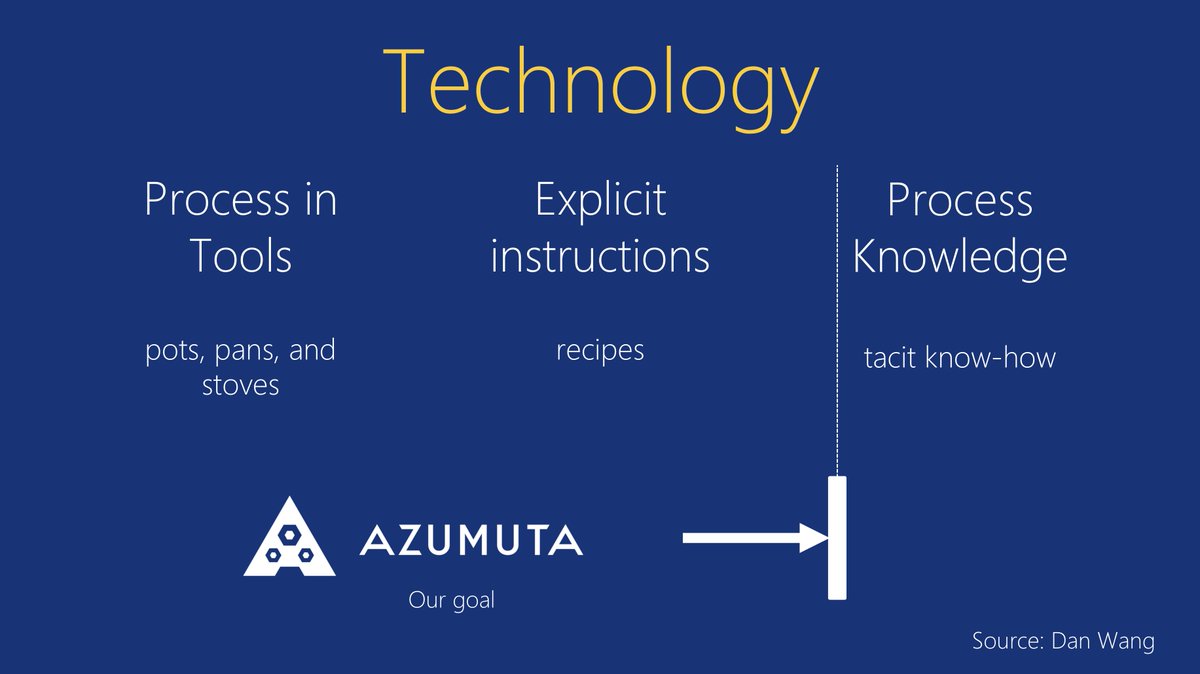
If you’re not viewing automation through a brutalist economic lens, you’re out of your mind. I’ve said this for years. In the year of our Lord 2025, I’m extremely pro-automation for deterministic problems.
Completely against it for nonlinear, non-deterministic, non-closed-form ones.
I’ve spent more time telling people what not to automate than what to. This isn’t armchair talk. I’ve built some of the largest manufacturing robots around.
64+ axes of synchronized high-speed motion. Hundreds of I/O channels. Written vel/acc/jerk trajectory planners from scratch. Closed MIMO loops with vision and thermal sensors. 5-axis toolpath generation, laser point-cloud fusion — all the “hard” stuff. Except it’s not. Those are easy because they’re closed-form.
The real world isn’t.
What blows my mind is how few people grasp the scope difference.
This isn’t a gap of degree. It’s a gap of kind.
I can look at a millisecond-timed multi-axis servo platform and feel actual joy. Then I watch a vision-guided arm try to unload a dishwasher and I want to scream.
A decade ago I said: forget human-replacement automation until AGI is real. I still stand by it. Humans are so good, so brutally efficient, that parity isn’t enough. You need super-parity.