CybEng retweetledi

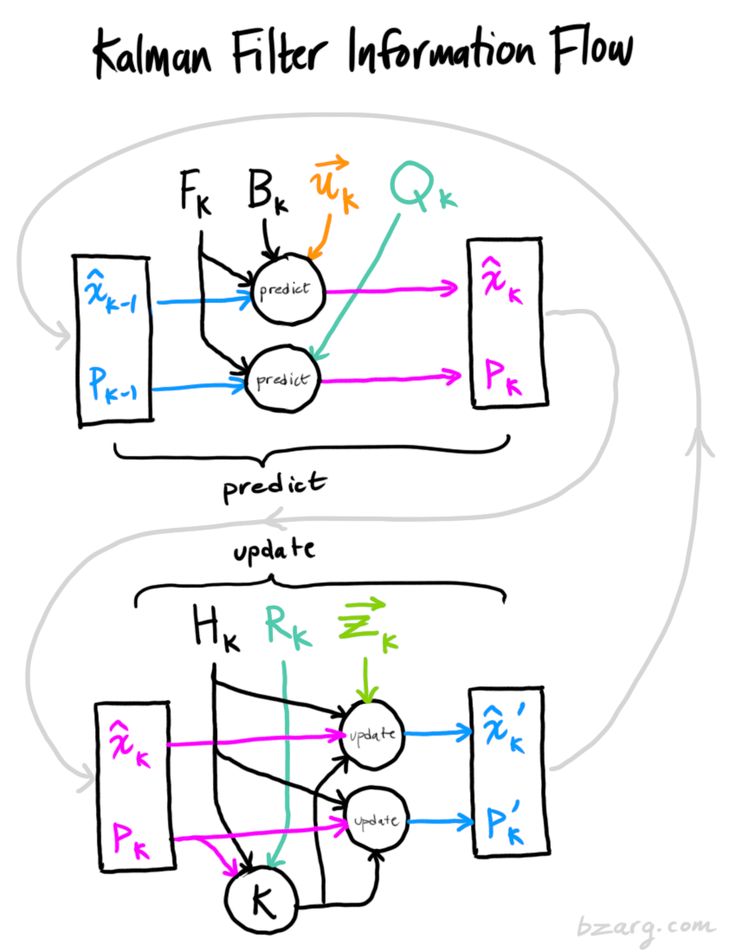
the Kalman Filter estimates the true state of a system from noisy measurements.
it works by combining two things:
• a model of how the system evolves
• imperfect sensor readings
it runs in a loop with two steps.
1. predict
use the system model to estimate the next state.
this gives a predicted state and uncertainty.
2. update
take a measurement.
compare it to the prediction.
correct the estimate.
the correction is weighted by the Kalman Gain:
• trust the model more → small correction
• trust the sensor more → large correction
uncertainty is tracked using the Covariance Matrix.
over time, the estimate converges.
noise gets filtered out.
the true state emerges.
used in:
• robotics localization
• self-driving cars
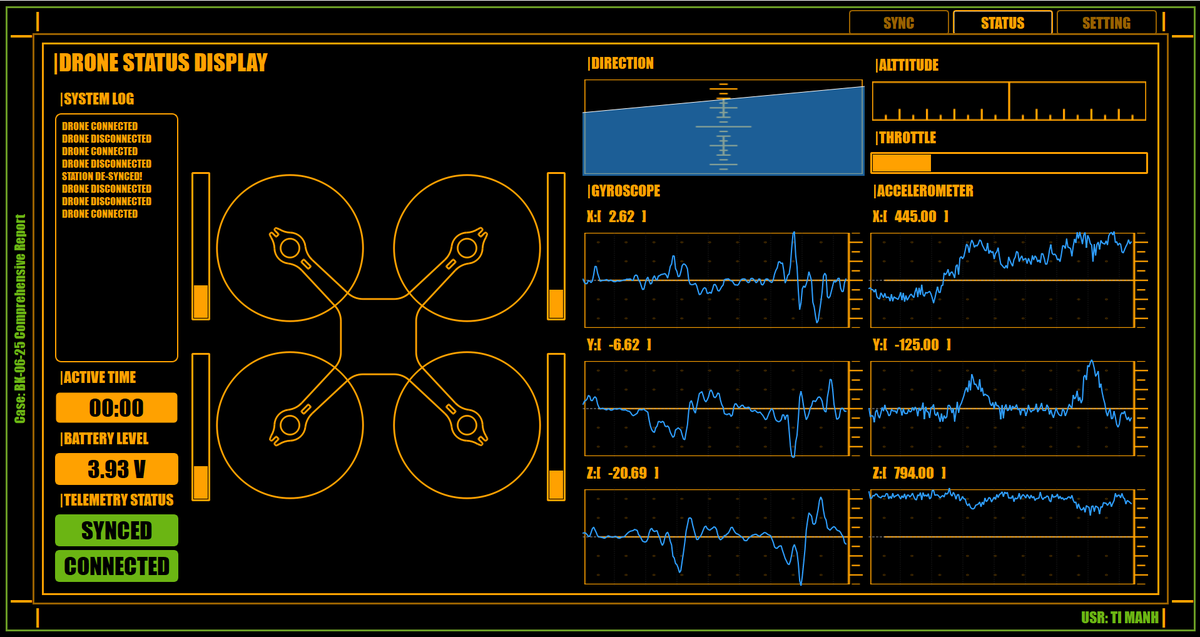
• drones and flight control
• GPS tracking
• sensor fusion
it is a recursive system that continuously refines its belief about reality under uncertainty.
English