Sabitlenmiş Tweet

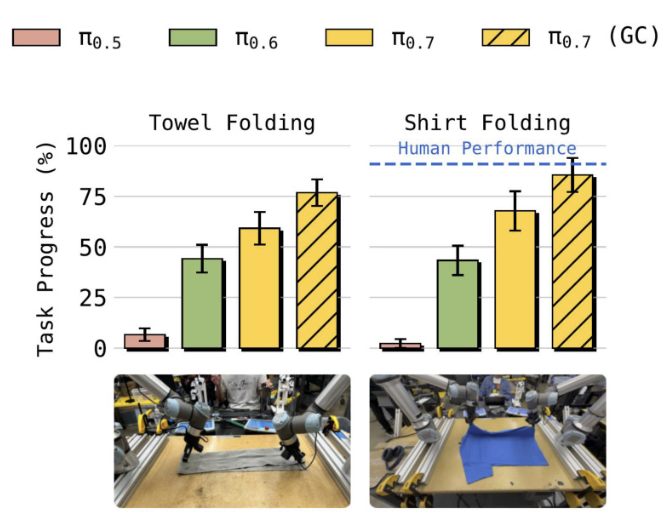
How to build vision-language-action models that train fast, run fast & generalize? In our new paper, we formalize & analyze the approach of our π-0.5 model & further improve it with a single stage recipe.
Blog: pi.website/research/knowl…
Paper: pi.website/download/pi05_…
English