Sabitlenmiş Tweet

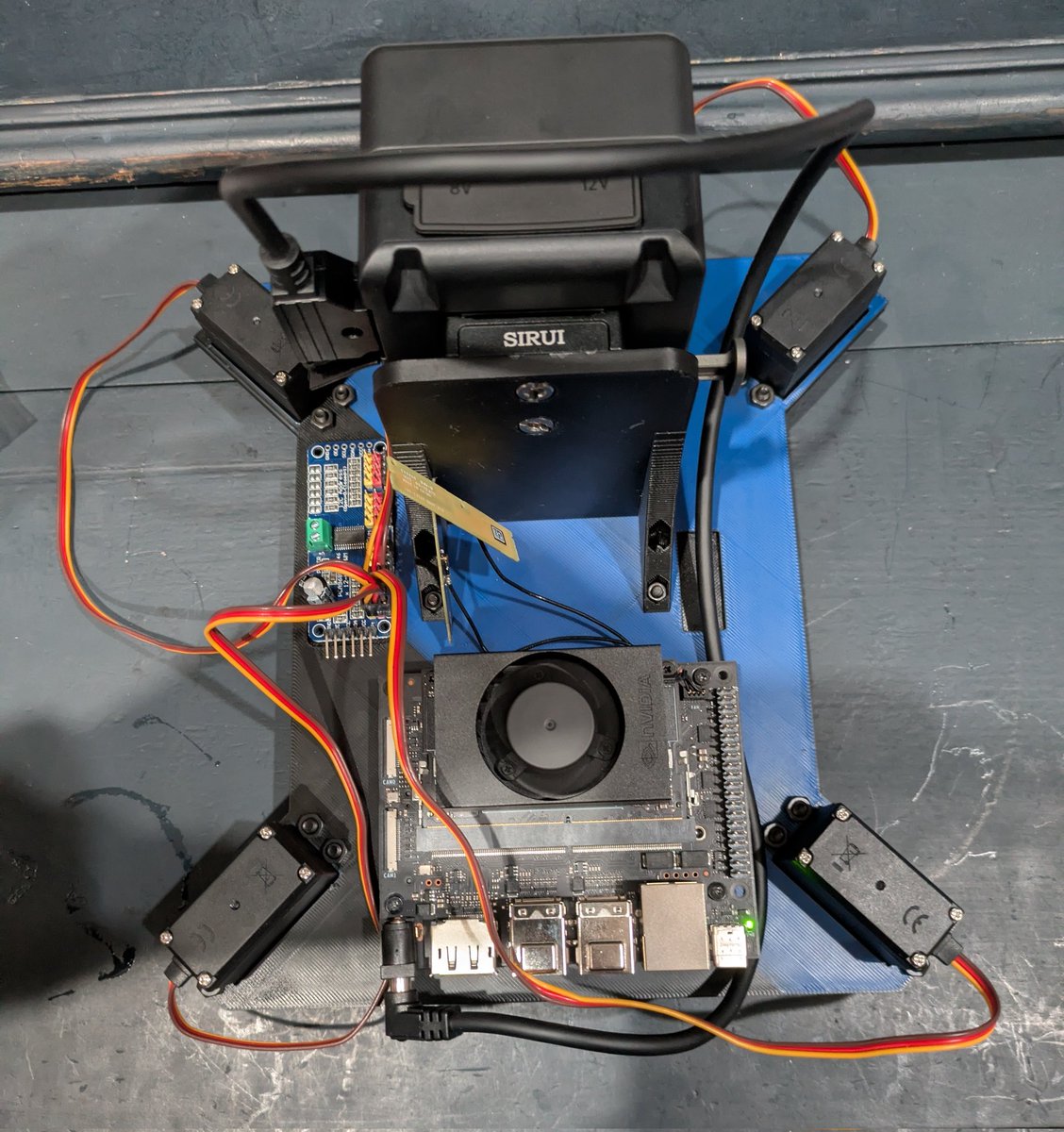
Needs a few more parts coming over the week and design changes, but it's coming together nicely!

English
Deseret Space & Engineering Technologies
265 posts
@DeseretSET
I'm just a guy who's an engineer for fun.

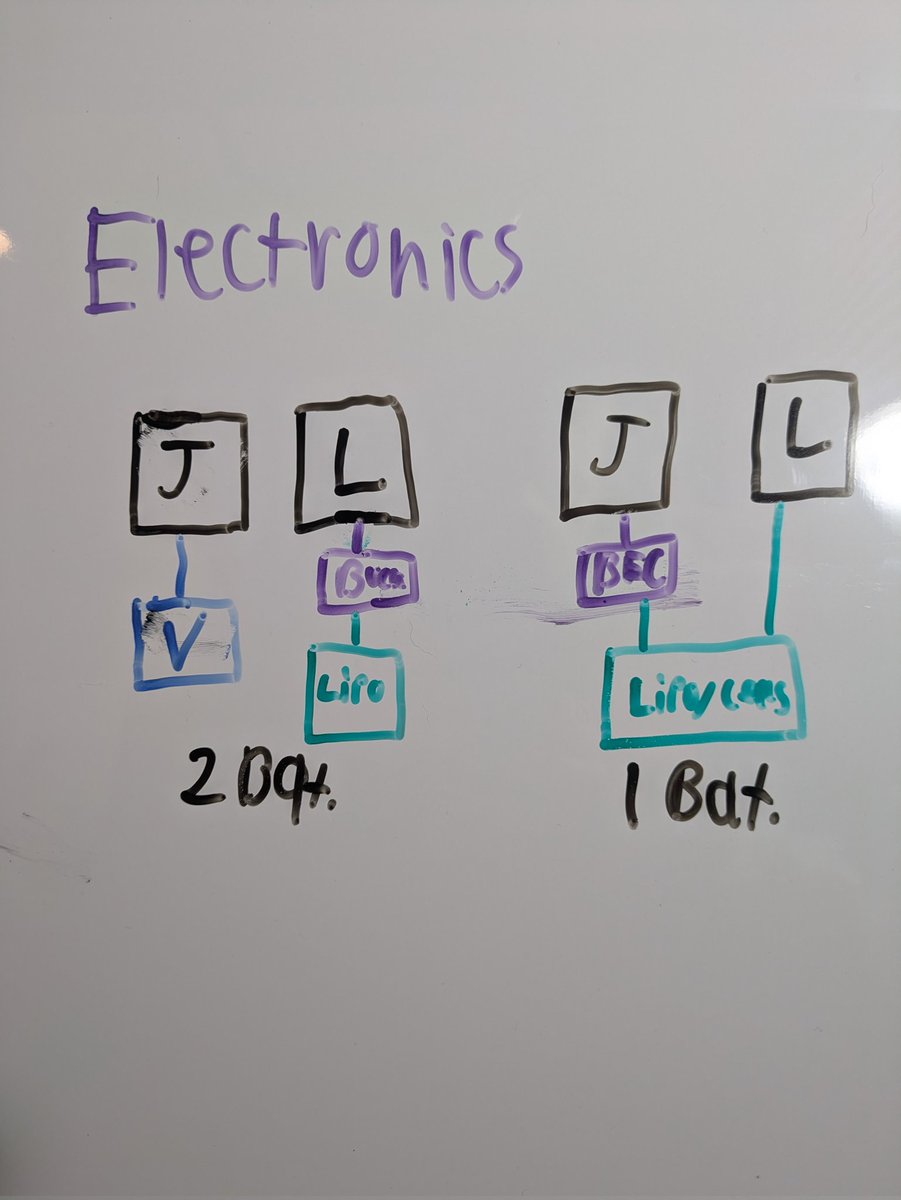
In this thread I will go over the basics of my robot's design, issues and improvements I can make. First the basics, it is a radially symmetric quadruped, for simplicity. Sorry for the clunkiness of this thread, I have turbo autism.