
狐𝒏𝒊𝒄𝒌🦊
3.5K posts

狐𝒏𝒊𝒄𝒌🦊
@Fox_nickeye
17年接触BTC / 23年底开始兼职撸毛 / 记录日常 不吵架不抱团不站队 随性的撸子 砍柴 担水 做饭
The Dark Forest Katılım Ocak 2024
2K Takip Edilen300 Takipçiler

目前@prlnet
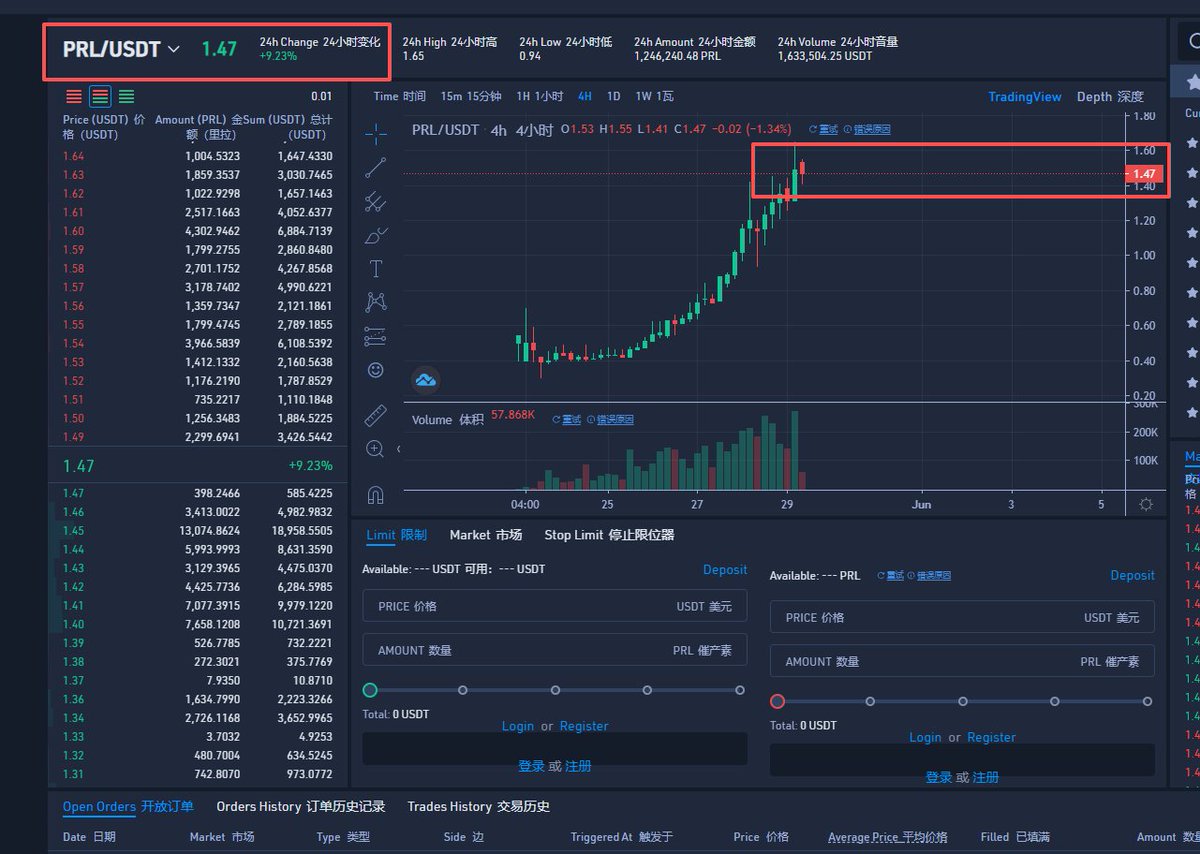
Pearl $PRL的价格在1.5刀左右,最近三天算力也是爆发式的增长,价格能撑多久?是继续破新高,还是达到一个高点后回落(矿塌了),谁也说不好,可能只有项目方最清楚(或做市商)吧!
就目前形势来说,加密赛道太缺乏造福效应(出圈的东西),如果Pearl能把目前的显卡矿重拉回到eth(pow)时,也算是币圈的又一杰作,必定Pearl 是基于实用工作量证明(Expo of Work)机制的区块链。
Pearl 的独特之处在于其网络安全机制。Pearl 不会将计算能力浪费在无意义的计算上,而是利用 GPU 计算执行真正具有经济价值的工作,例如 AI 推理。这意味着同样的 GPU 计算资源既能保障区块链安全,又能提供有价值的 AI 服务。
希望项目方能够按照它的设想和规划,按部就班的前行,不要让大家再次看到ALEO的影子。
A9投研@a9touyan5211314
Pearl ($PRL)@prlnet币价起飞,算力起飞,每个块儿收到的币在明显的降低,昨天联系了几家出租5090的,竟然都没货。vast平台上的5090也快被扫光了,而且价格一路上涨。兄弟们大胆的猜测一下,Pearl ($PRL)能否把显卡矿带回当年的状态。
中文


【Axis Robotics交互分享-5/28】
1⃣这次 Axis @axisrobotics 的重点是:不再只证明自己能生成数据,而是开始证明这些数据能训练模型。也就是从 数据管线 进入 模型验证阶段。
①小模型验证:ACT / DP
.Axis 构建了自己的 Axis Task benchmark。做法是:“用单个 Axis 任务的数据,从零训练 ACT / DP 小模型,再在同一任务上测试。”
.结果说明:Axis 数据可以支持稳定的单任务 policy learning。
②大模型验证:Pi0.5
.Axis 又用 82 个 Axis 任务 预训练 Pi0.5,然后在 MuJoCo 中用 LoRA 做任务微调。
.结果显示:Pi0.5 在目标任务上表现出较强泛化能力。
2⃣目前Axis官方展示的流程:Web 数据 → IsaacLab replay → 训练数据生成 → MuJoCo replay → continued pretraining → LoRA finetuning → 最终评估
①简单来说:用户贡献的数据,会被回放、整理、训练、微调,最后用模型表现来验证质量。
3⃣这对 Axis Robotics有什么意义?
①这一步非常关键。因为企业客户买 Task Package,真正关心的不是“有多少条轨迹”,而是:这些数据能不能让模型变强。
②所以这次更新是在强化 Axis 的商业逻辑:“数据不是终点,模型效果才是数据价值的证明。”
@0xsexybanana @dj673285379 @plpiaoliang @chris_anm01 @0xzagen @Rainhoole

Axis Robotics@axisrobotics
We validated the Axis data pipeline through model training in two ways: - ACT/DP small-model benchmark: trained from scratch and evaluated on individual Axis tasks, showing that Axis-rendered data supports reliable single-task policy learning. - Pi0.5 foundation-model training: pretrained on 82 Axis tasks and finetuned with LoRA in MuJoCo, showing strong generalization across target tasks. This is a key step in our closed-loop data loop: using model performance to verify data quality and guide further optimization of the upstream data pipeline. Details and demos below. ⬇️
中文

🥲ETH跌跌不休,V神却要去写科幻小说了
Vitalik 在 Farcaster 宣布,决定换个方式探讨去中心化治理,写科幻小说。
他原话是"不想再写那些常规博客了",这也是他首次尝试虚构题材创作。
时机有点微妙,ETH 持续低迷,Bankless 联创清空 ETH 持仓,以太坊基金会多位成员相继离职,Vitalik 本人上周刚发长文谈 EF 转型方向。
Solana 社区已经开嘲:"ETH 在跌,他去写小说。"
密码朋克文化本来就和科幻叙事高度绑定,从《雪崩》到现在这条路不算新鲜。
只是选择这个节点用虚构来谈治理,社区的情绪反应不佳,也难以避免。

中文

【Axis Robotics周报总结-5/26】
1⃣这次 Axis Weekly 的重点是:
. Axis 正在把机器人数据系统从“能生成任务”推进到“能验证质量、识别作弊、处理失败、跨仿真训练、面向真实部署”的完整闭环。
2⃣目前最关键的进展有4个:
①Task 805 失败率异常来自 bot 干扰,已开始自动化反作弊和后端 replay 验证。
②TaskGen 支持可动结构任务,开始覆盖微波炉、烤箱、柜子等真实交互对象。
③失败恢复管线接近产品集成,自动化训练与评估流程更完整。
④跨仿真训练达到约 40% success rate,说明数据管线具备早期迁移潜力。
3⃣通过以上周总结,我们明显能感受到 @axisrobotics 正在从“机器人任务生成平台”,升级为“可验证、可恢复、可迁移的 Physical AI 数据引擎”。
4⃣当然目前在完成测试任务的过程中,经常还是会遇见一些小BUG,比如完成任务后无法触发完成指令,模型与模型之间容易产生粘黏等。这些相信团队已经在积极处理了,测试期间本身就是个迭代过程,作为早期用户,保持耐心,保持建设。
@0xsexybanana @dj673285379 @plpiaoliang @chris_anm01 @0xzagen @Rainhoole

中文
狐𝒏𝒊𝒄𝒌🦊 retweetledi

agent has delivered a message.
message:
{
form_status: OPEN,
access_wave: GENESIS,
endpoint: obsidry.app
}
be ready folks.
English
狐𝒏𝒊𝒄𝒌🦊 retweetledi

美股券商开了🇺🇸、出入金账户有了🏦
还没有海外电话卡?📱
0元开 giffgaff eSIM 🇬🇧(充10英镑,能保号几十年)
只需10分钟搞定:
1⃣ 准备一个有eSIM功能手机(海外版都有,之前的索拉纳二代手机也有,或者用电脑去开模拟器有很多教程);
2⃣ 应用市场下载giffgaff;
3⃣ 注册进入app,选择eSIM,不选套餐直接滑至底部,下一步;
4⃣ 用之前办的WISE或者u卡,充值10英镑;
5⃣ 自动安装配置eSIM,就可以用了;
6⃣ 每半年发一次短信保号(费用0.3磅,收短信不算)。
👆完成✅
老白|LaoBai 🌊🌳@bclaobai
什么?美股券商开完,不会出入金?💵 先把“WISE”、“IFAST”、“熊猫速汇”开了(护照、身份证就行🏦) 弄几个海外银行账户,出入金问题解决👇 ( 先开WISE,用WISE入金IFAST激活 ) WISE注册:tinyurl.com/laobai138 IFAST注册:tinyurl.com/laobai136 熊猫速汇:s.pandaremit.com/2vuIGB
中文


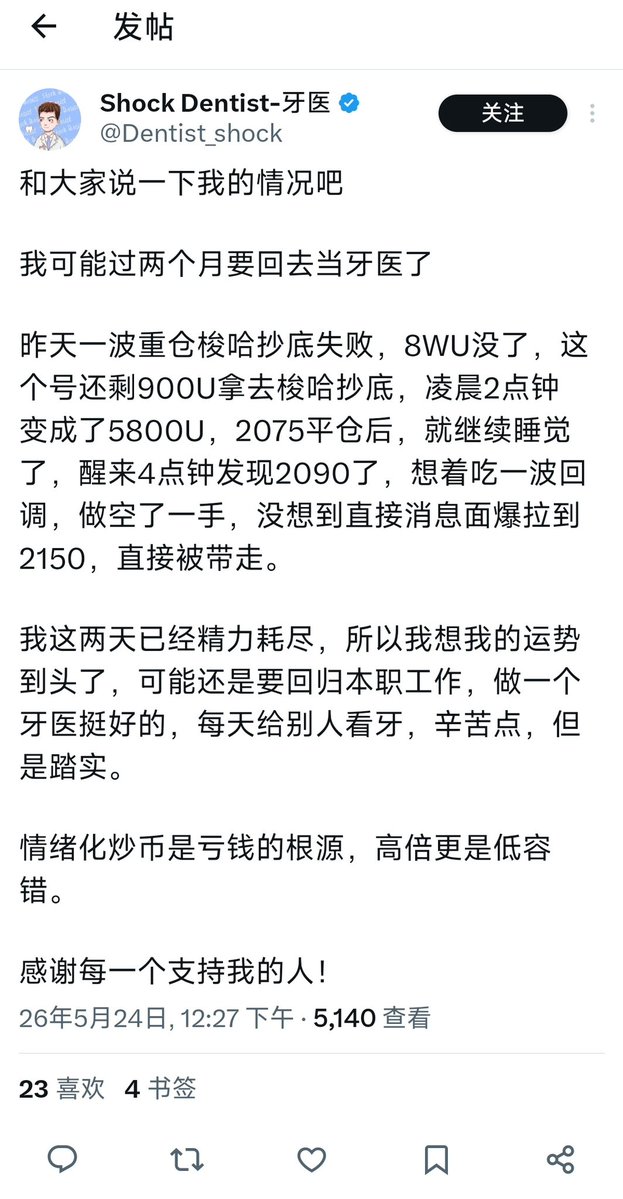
在这里,不用猜了,目前盈利4.3万刀,基本相当于把我之前亏损的本金赚回来了!
最主要的是设置了73800的止损,这就是我昨天说的做分析做交易博的是性价比,只要盈亏比合适就可以干,不要被恐惧所干扰!
这个就相当于打德州一样,只要严格执行交易策略,按照一个指标前进,做好仓位管理,长期来看一定是正EV的。
我这个是实盘的,只是因为前面上头两次搞崩了,一次是RAVE 一次是硬抗BTC,就这两笔亏损基本磨平了之前的所有收益,这就是我应该反思的,后续考虑在OKX或者币安再搞一个实盘,专门验证自己的交易策略……

子棋(重生版)@cloakmk
我是知行合一的人! 你们猜昨天晚上我分析后开的这个仓位目前盈利多少? 猜对了有奖哟,当大家都在看跌的时候市场不见得会跌,至少不见得会立马跌,关键就在于明天美股开盘后的走势,当前BTC下跌可以认为趋势反弹结束,也可以认为是趋势反弹中的调整…… 因此,不要盲目看多或者空,涨跌很快,做好交易计划和仓位管理很重要,一旦开单一定要理智再理智,不理智就会被市场重锤一击!
中文
【Axis Robotics交互分享-5/24】
1⃣官推的这篇帖子应该定义为Axis 商业化系列的 第 2 篇:谁会购买 Axis 的数据?
①机器人硬件公司:
.当然很多大型公司带顶级实验室的多数自己会一条龙的走完全套。但毕竟少数。
.而Axis的数据模型针对的应该是其之后的机器人硬件公司,硬件自己生产而模型数据可以寻找第三方。
.Axis 提供的不是卖原始数据,而是提供 Few-Shot Deployment Loop。硬件伙伴只需要采集 20–30 条真实场景轨迹,其余多样性和规模由 Axis 仿真数据补足。
②机器人基础模型公司:
.这类型公司最大痛点就是对高质量、多样化、可交互的数据的需求。
.而Axis可以提供高质量 trajectory packages、结构化 task bundles、大规模随机化任务和轨迹数据等。
.并且可以帮助它们减少自己搭建仿真数据管线的成本。
③垂直行业&企业:
.这类的最大痛点:如制造、汽车、物流等企业更关心最终部署效果。它们有复杂的真实工作流,但缺少针对具体场景的训练数据。
.而Axis可以把复杂工业流程拆成机器人任务,用 Scenario 和 Atomic Skills 定义任务,通过仿真生成大量训练数据,训练出可用于真实生产线的操作策略。
.就如推文中提到的,Axis 正在为一家全球头部汽车制造商交付端到端自动化方案,目标是让机器人自动分拣数百种不同汽车零部件。
2⃣简单说,目前 @axisrobotics 正在补齐 自己的商业闭环:
.客户需求→ Task Package→ 任务生成→ 轨迹数据采集→ 数据清洗与训练→ 模型部署→ 真实场景自动化
.Task Package 不只是概念,而是面向上文叙述的三类客户的商业交付单元。
.当然随着科技的发展,Axis后期面向的客户种类只会更多。
@0xsexybanana @dj673285379 @plpiaoliang @chris_anm01 @0xzagen @Rainhoole
中文




别人发空白推文 = 3000万流量
我发空白推文 = 2000流量
他这条估计能拿到几千美金的马斯克工资
同样的空白,不同的命
໊@user0000O0
︎ ︎ ︎ ︎ ︎ ︎ ︎ ︎ ︎ ︎ ︎ ︎
中文
狐𝒏𝒊𝒄𝒌🦊 retweetledi

VPS不需要那么多软件,只要这五个就够了。
分享一下我自己常驻在VPS和NAS上,一直不舍得换掉的五个软件:
1、Vaultwarden(密码管理):Bitwarden 服务端 Rust 重写版,Docker 一行起,所有终端走自家 VPS,年费省掉
2、Memos(轻量笔记 / Flomo 平替):随手记 + 日期归档 + Markdown 全支持,idea 池全在这
3、FreshRSS(RSS 阅读):Reeder 同步源自己定,避开 Feedly 限免费档
4、Beszel(轻量监控):100M 内存跑齐 CPU / 内存 / 硬盘 / 网络,告警发 Telegram,比 Uptime Kuma 还轻
5、AdGuard Home(DNS 广告拦截):家里所有设备走这个,App 内广告也能拦掉
其实这套跑下来其实不需要多少内存,只要是硬盘大一点就可以了,我最常使用的还是密码管理器和RSS阅读功能。
我存放的密码可能有几百个了,但是可以被这个软件统一管理,让我很方便。rss是我的数据收集系统的基座,我会收集好几个论坛的信息,然后做整合。

中文
【Axis Robotics交互记录分享-5/22】
1⃣周末的牛马终于可以休息了,这个季节最应景的食物就是龙虾毛豆啤酒,晚上任务做完就去炫一顿。
2⃣ @axisrobotics 现在的测试网任务完成速度是越来越快,但同样机器人脚本也开始兴风作浪。所以如果当时有任务没有及时完成的小伙伴,第二天可以在看下测试网,团队封禁的机器人卡槽依然会释放出来,可以接着完成。
3⃣转发的这篇官推帖子实际就讲了一件事:Axis 不是单纯在收集“机器人操作视频”或“用户任务轨迹”,而是在尝试把复杂机器人任务,拆解成 可训练、可复用、可组合的最小动作单元。也就是Atomic Skills(原子技能)。
①说通俗点就是以点到面。如果让机器人一开始就去做复杂的任务,训练起来难度特别大失败率也高。
②但是可以把一套复杂的任务拆散,先让机器人去学习一些最简单的任务,如抓、放、推、拉、开关、倾倒、插入 等原子技能。
③这种训练方式的好处:
.能力复用:学新任务更快
.空间泛化:换位置、换布局也能做
.错误恢复:失败后能切换恢复技能
④这就解释了Atomic Skills 是 Axis 机器人数据引擎里的核心中间层。
@0xsexybanana @dj673285379 @plpiaoliang @0xzagen @Rainhoole

Axis Robotics@axisrobotics
In our Task Package breakdown, we highlighted Dimension 2: Atomic Skills. But what exactly are they, and why are they critical? While recent trends in robotic learning rely heavily on end-to-end models—trying to map raw camera pixels straight into complex movements in one giant leap—this method can be extremely data-hungry and brittle in complex, real-world environments. The solution is architectural: deconstructing complex, long-horizon tasks into indivisible, foundational physical actions—like Grasp, Place, Push, or Pivot. These are atomic skills. They successfully decouple high-level cognitive reasoning ("what to do") from low-level motor control ("how to move"). As demonstrated by research from Google DeepMind, scaling robotic intelligence fundamentally relies on dynamically composing a robust library of these base atomic skills. It establishes a shared, scalable conceptual structure for autonomous agents. Training models on atomic skill sequences unlocks true generalization: - Capability Reuse: A robot that already knows how to "Push" and "Grasp" doesn't relearn basic physics for a new task; it simply learns a new sequence. - Spatial Generalization: Skills adapt to local geometry, working flawlessly no matter where an object sits in the workspace. - Error Recovery: If a grasp fails, the system doesn't freeze. It recognizes the failure and triggers a recovery skill. Raw, unsegmented teleoperation video suffers from a low signal-to-noise ratio. At Axis, our Dynamic Data Engine structures human intelligence into these exact atomic sequences, delivering the high-value building blocks foundation models need to achieve robust generalization.
中文